 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[单选题]
在深度优先搜索策略中,open表是()的数据结构。
A.先进后出
B.先进先出
C.根据价值函数重排
D.随机出
 答案
答案
A、先进后出
 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
A.先进后出
B.先进先出
C.根据价值函数重排
D.随机出
答案
A、先进后出
如果结果不匹配,请 联系老师 获取答案
 更多“在深度优先搜索策略中,open表是()的数据结构。”相关的问题
更多“在深度优先搜索策略中,open表是()的数据结构。”相关的问题
A.open表用于存放已扩展过的节点
B.closed表表用于存放所有已生成而未扩展的节点
C.closed表用于存放已扩展过的节点
D.open表用于存放所有已生成的节点
在分支一限界算法设计策略中,通常采用(54)搜索问题的解空间。
A.深度优先
B.广度优先
C.自底向上
D.拓扑序列
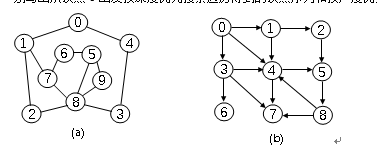
从大到小的次序链接的,试分别写出从顶点0出发按深度优先搜索遍历得到的顶点序列和按广度优先搜索遍历得到的顶点序列。
A、1,2,3,4,5
B、1,2,3,5,4
C、1,2,4,5,3
D、1,2,5,3,4
(48) ,(50) A.O(n2)
B.O(n)
C.O(n-1)
D.O(n+1)
(49) A.O(e)
B.O(e-1)
C.O(e2)
D.O(e+10)
阅读下列函数说明和C函数,将应填入(n)处的字句写在对应栏内。[说明]
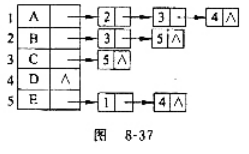
邻接表是图的一种顺序存储与链式存储结合的存储方法。其思想是:对于图G中的每个顶点 vi,将所有邻接于vi的顶点vj连成一个单链表,这个单链表就称为顶点vi的邻接表,其中表头称作顶点表结点VertexNode,其余结点称作边表结点EdgeNode。将所有的顶点表结点放到数组中,就构成了图的邻接表AdjList。邻接表表示的形式描述如下: define MaxVerNum 100 /*最大顶点数为100*/
typedef struct node{ /*边表结点*/
int adjvex; /*邻接点域*/
struct node *next; /*指向下一个边表结点的指针域*/ }EdgeNode;
typedef struct vnode{ /*顶点表结点*/
int vertex; /*顶点域*/
EdgeNode *firstedge; /*边表头指针*/
}VertexNode;
typedef VertexNode AdjList[MaxVerNum]; /*AdjList是邻接表类型*/
typedef struct{
AdjList adjlist; /*邻接表*/
int n; /*顶点数*/
}ALGraph; /*ALGraph是以邻接表方式存储的图类型*/
深度优先搜索遍历类似于树的先根遍历,是树的先根遍历的推广。
下面的函数利用递归算法,对以邻接表形式存储的图进行深度优先搜索:设初始状态是图中所有顶点未曾被访问,算法从某顶点v出发,访问此顶点,然后依次从v的邻接点出发进行搜索,直至所有与v相连的顶点都被访问;若图中尚有顶点未被访问,则选取这样的一个点作起始点,重复上述过程,直至对图的搜索完成。程序中的整型数组visited[]的作用是标记顶点i是否已被访问。
[函数]
void DFSTraverseAL(ALGraph *G)/*深度优先搜索以邻接表存储的图G*/
{ int i;
for(i=0;i<(1);i++) visited[i]=0;
for(i=0;i<(1);i++)if((2)) DFSAL(G,i);
}
void DFSAL(ALGraph *G,int i) /*从Vi出发对邻接表存储的图G进行搜索*/
{ EdgeNode *p;
(3);
p=(4);
while(p!=NULL) /*依次搜索Vi的邻接点Vj*/
{ if(! visited[(5)]) DFSAL(G,(5));
p=p->next; /*找Vi的下一个邻接点*/
}
}

















