题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[单选题]
已知地形图上A点所在小方格的左下角顶点坐标为(400,600),从该顶点出发沿横坐标线量至点A的图上距离为7.3cm,从该顶点沿纵坐标线量至点A的图上距离为3.6cm,地形图比例迟为1:1000,则A点的坐标为()。
A.(436,673)
B.(473,636)
C.(364,527)
D.(327,564)
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
A.(436,673)
B.(473,636)
C.(364,527)
D.(327,564)
如果结果不匹配,请 联系老师 获取答案
 更多“已知地形图上A点所在小方格的左下角顶点坐标为(400,600…”相关的问题
更多“已知地形图上A点所在小方格的左下角顶点坐标为(400,600…”相关的问题
边长均为a 的六边形顶点上,分别固定有质量均为m 的6个质点,如图所示。某同学计算这六个质点组成的系统的转动惯量,所得结果为 ,他计算时所选择的轴是
,他计算时所选择的轴是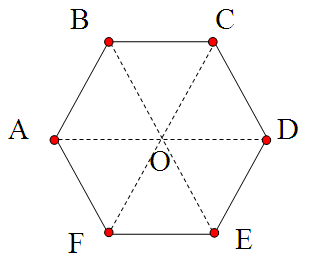
A、位于此六边形所在平面内过A点且垂直于AD的轴
B、AD轴
C、垂直于此六边形所在平面且通过A点的轴
D、垂直于此六边形所在平面且通过O点的轴
已知 是以原点O为顶点的平行六面体的三条边,求此平行六面体过点O的对角线与平面ABC的交点的定位向量。
是以原点O为顶点的平行六面体的三条边,求此平行六面体过点O的对角线与平面ABC的交点的定位向量。
阅读以下说明及C++程序代码,将应填入(n)处的语句写在对应栏内。
【说明】
本程序的功能是根据矩形左上角和右下角顶点坐标生成一个矩形对象,然后输出该矩形4个顶点的坐标,计算并输出该矩形的面积。
【C++代码】
include<iostream>
using namespace std;
class MyPoint(//表示平面坐标系中的点的类
double x;
double y;
public:
MyPoint (double x,double y){this->x=x;this->y=y;}
double getX()const{(1);}
double getY()const{ return y;}
void show()const{ cout<<'('<<x<<','<<y<<')';}
};
class MyRectangle{ //表示矩形的类
MyPoint upleft; //矩形的左上角顶点
MyPoint down right; //矩形的右下角顶点
public:
MyRectangle(MyPoint upleft,MyPoint downright);
MyPoint getUpLeft()const{return up_left;} //返回左上角坐标
MyPoint getDownRight()const{return down_right;} //返回右下角坐标
MyPoint getUpRight()const; //返回右上角坐标
MyPoint getDownLeft()const; //返回左下角坐标
double area()const; //返回矩形的面积
};
MyRectangle:: MyRectangle((2)):
up left(p1),down_right(p2){}
MyPoint MyRectangle::getUpRight()const
{
return MyPoint(down_right.getX(),up_left.getY());
}
MyPoint MyRectangle::getDownLeft()const
{
return MyPeint((3));
}
double (4) ::area()const
{
return (getUpLeft(),getX()-getDownRight().getX())*
(getDownRight().getY()-getUpLeft().getY());
}
int main()
{
MyRectangle r(MyPoint(0,2),MyPoint(2,0));
r.getUpLeft(),show();
r.getUpRight().show();
r.getDown Right().show();
(5);
cout<<r.area()<<end1;
return 0;
}
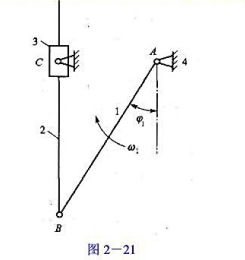
已知附图2-21所示机构的尺寸和位置,lAC=50mm,lAD=100mm, 1=30°;构件1以匀角速度顺时针方向转动,
1=30°;构件1以匀角速度顺时针方向转动, 1=10rad/s,要求用相对运动图解法进行运动分析;
1=10rad/s,要求用相对运动图解法进行运动分析;
(1)求构件2的角速度2和角加速度a2;
(2)在原动件简图上找出构件2上速度为零的点的位置和加速度为零的点的位置.
A.9.1型管理
B. 9.9型管理
C. 1.9型管理
D. 1.1 型管理