 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[单选题]
当与常开接点相对应的线圈或离散输入点为导通时,此常开接点有电流通过此点成为()。
A.常开接点
B.常闭接点
C.接点
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
A.常开接点
B.常闭接点
C.接点
如果结果不匹配,请 联系老师 获取答案
 更多“当与常开接点相对应的线圈或离散输入点为导通时,此常开接点有电…”相关的问题
更多“当与常开接点相对应的线圈或离散输入点为导通时,此常开接点有电…”相关的问题
A.接地相的相电压恒为零
B.接地相的相电压时减时增
C.非故障相的相电压时大时小或有时正常
D.非故障相的相电压恒为线电压
试题一(共 15分)
阅读以下说明和算法,完善算法并回答问题,将解答写在答题纸的对应栏内。
[说明]
假设以二维数组G[1..m,1..n]表示一幅图像各像素的颜色,则G[i,j]表示区域中点(i,j)处的颜色,颜色值为0到k 的整数。下面的算法将指定点(i0,j0)所在的同色邻接区域的颜色置换为给定的颜色值。约定所有与点(i0,j0)同的上、下、左、右可连通的点组成同色邻接区域。
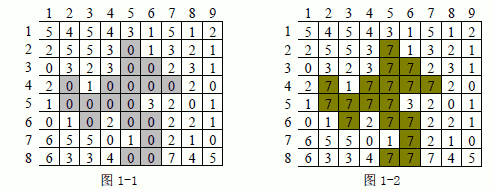
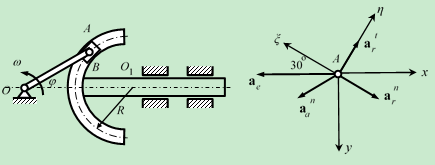
例如,一幅8×9 像素的图像如图1-1 所示。设用户指定点(3,5),其颜色值为0,此时其上方(2,5)、下方 (4,5)、右方(3,6)邻接点的颜色值都为0,因此这些点属于点(3,5)所在的同色邻接区域,再从上、下、左、右四个方向进行扩展,可得出该同色邻接区域的其他点(见图1-1 中的阴影部分)。将上述同色区域的颜色替换为颜色值7所得的新图像如图1-2 所示。
[算法]
输入:矩阵 G,点的坐标(i0,j0),新颜色值newcolor。
输出:点(i0,j0)所在同色邻接区域的颜色置换为newcolor之后的矩阵G。
算法步骤(为规范算法,规定该算法只在第七步后结束):
第一步:若点(i0,j0)的颜色值与新颜色值newcolor相同,则(1) ;
第二步:点(i0,j0)的颜色值→oldcolor;创建栈S,并将点坐标(i0,j0)入栈;
第三步:若 (2) ,则转第七步;
第四步:栈顶元素出栈→(x,y),并(3) ;
第五步:1) 若点(x,y-1)在图像中且G[x,y-1]等于oldcolor,则(x,y-1)入栈S;
2) 若点(x,y+1)在图像中且G[x,y+1]等于oldcolor,则(x,y+1)入栈S;
3) 若点(x-1,y)在图像中且G[x-1,y]等于oldcolor,则(x-1,y)入栈S;
4) 若点(x+1,y)在图像中且G[x+1,y]等于oldcolor,则(x+1,y)入栈S;
第六步:转 (4) ;
第七步:算法结束。
[问题]
是否可以将算法中的栈换成队列?回答: (5) 。
阅读以下说明和算法,完善算法并回答问题,将解答写在对应栏内。
[说明]
假设以二维数组G[1..m,1..n]表示一幅图像各像素的颜色,则G[i,j]表示区域中点(i,j]处的颜色,颜色值为0到k的整数。
下面的算法将指定点(i0,j0)所在的同色邻接区域的颜色置换为给定的颜色值。约定所有与点(i0,j0)同色的上、下、左、右可连通的点组成同色邻接区域。
例如,一幅8×9像素的图像如图1-1所示。设用户指定点(3,5),其颜色值为0,此时其上方(2,5)、下方(4,5)、右方(3,6)邻接点的颜色值都为0,因此这些点属于点(3,5)所在的同色邻接区域,再从上、下、左、右四个方向进行扩展,可得出该同色邻接区域的其他点(见图1-1中的阴影部分)。将上述同色区域的颜色替换为颜色值7所得的新图像如图1-2所示。
.jpg)
[算法]
输入:矩阵G,点的坐标(i0,j0),新颜色值newcolor。
输出:点(i0,j0)所在同色邻接区域的颜色置换为newcolor之后的矩阵G。
算法步骤(为规范算法,规定该算法只在第七步后结束):
第一步:若点(i0,j0)的颜色值与新颜色值newcolor相同,则(1);
第二步:点(i0,j0)的颜色值→oldcolor;创建栈S,并将点坐标(i0,j0)入栈;
第三步:若(2),则转第七步;
第四步:栈顶元素出栈→(x,y),并(3);
第五步:
1) 若点(x,y-1)在图像中且G[x,y-1]等于oldcolor,则(x,y-1)入栈S;
2) 若点(x,y+1)在图像中且G[x,y+1]等于oldcolor,则(x,y+1)入栈S;
3) 若点(x-1,y)在图像中且G[x-1,y]等于oldcolor,则(x-1,y)入栈S;
4) 若点(x+1,y)在图像中且G[x+1,y)等于oldcolor,则(x+1,y)入栈S:
第六步:转(4);
第七步:算法结束。
[问题]
是否可以将算法中的栈换成队列?回答:(5)。
A.排序分析
B.频度分析
C.趋中趋势分析
D.离散分析
A.
B.
C.
D.
(1)证明当x在[0,2π]均匀分布时,信道达到容量。
(2)对下列两种情况求信道容量C;
1 ,其他
,其他
2
A、为保证可靠性,每台智能终端均连接到断路器两个跳圈上
B、两个智能终端应与断路器的两个跳闸线圈分别一一对应
(1)以O1O2连线的中点O为原点,求轴线上坐标为x的任意点的磁感应强度大小;
(2)试证明:当a=R时,O点处的磁场最为均匀。
范围查询的另一解法需要借助范围树(range tree)。
为此,首先仿照如图8.37(教材240页)和图8.38(教材241页)所示的策略,按x坐标将平面上所有输入点组织为一棵平衡二叉搜索树,称作主树(main tree)。
于是如图x8.10(a)和(b)所示,该树中每个节点各自对应于一个竖直的条带区域;左、右孩子所对应的条带互不重叠,均由父节点所对应的条带垂直平分而得;同一深度上所有节点所对应的条带也互不重叠,而且它们合并后恰好覆盖整个平面。
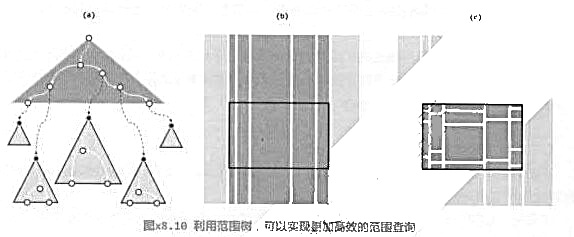
接下来,分别对于主树中每一节点,将落在其所对应条带区域中的输入点视作一个输入子集,并同样采用以上方法,按照y坐标将各个子集组织为一棵平衡二叉搜索树,它们称作关联树(associative tree)。于是如图x8.10(a)和(c)所示,每棵关联树所对应的竖直条带,都会进而逐层细分为多个矩形区域,且这些矩形区域也同样具有以上所列主树中各节点所对应条带区域的性质,至此,主树与这o(n)棵关联树构成了一个两层的嵌套结构,即所谓的范围树。
利用范围树,可按如下思路实现高效的范围查询,对于任一查询范围R=[x1,x2]×[y1,y2],首先按照[x1,x2]对主树做一次×方向的范围查询。根据8.4.1节的分析结论,如此可以得到o(logn)个节点,而且如x8.10(b)所示,它们所对应的竖直条带互不重叠,它们合并后恰好覆盖了x坐标落在[x1,x2]范围内的所有输入点。
接下来,深入这些节点各自对应的关联树,分别按照[y1,y2]做一次y方向的范围查询。如此从每棵关联树中取出的一系列节点,也具有与以上取自主树的节点的类似性质,具体地如图x8.10(c)所示,这些节点所对应的矩形区域互不重叠,且它们合并之后恰好覆盖了当前竖直条带内y坐标落在[y1,y2]范围内的所有输入点。换而言之,这些点合并之后将给出落在R中的所有点,既无重也不漏。
a)试证明,如此实现的范围树,空间复杂度为o(nlogn);
b)按照以上描述,试利用你的范围树实现新的范围查询算法;
c)试证明,以上范围查询算法的时间复杂度为O(r+log2n),其中r为实际命中并被报告的点数;
d)继续改进以上范围树,在不增加空间复杂度的前提下,将查询时间减至O(r+logn)。

















