 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[单选题]
A robot whose main frame. consists of three linear axes is called a()robot.
A.Cylindrical
B.Humanoid robot
C.soft
D.Cartesian
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
A.Cylindrical
B.Humanoid robot
C.soft
D.Cartesian
如果结果不匹配,请 联系老师 获取答案
 更多“A robot whose main frame. cons…”相关的问题
更多“A robot whose main frame. cons…”相关的问题
有以下程序 int a=2; int f(int *a) {return (*a)++; } main () int s=0; { int a=5; s+=f (&a); } s+=f (&a); printf ("%d\n",s ); 执行后输出结果是
A.10
B.9
C.7
D.8
函数main()、f()的定义如下所示,调用函数f()时,第一个参数采用传值(call by value)方式,第二个参数采用传引用(call by reference)方式,main函数中“print(x)”执行后输出的值为()。
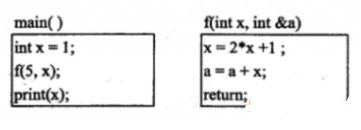
A.1
B.6
C.11
D.12
有以下程序int f(int n){ if(n==1 return 1; else return f(n-1)+1;}main(){ int i,j=0; for(i=1;i<3;i++) j+=f(i); printf("%d\n",j);}程序运行后的输出结果是A.4 B.3 C.2 D.1
A.-8
B.14
C.0
D.-24
以下程序通过函数sunFun求![]() 。这里f(x)=x2+1
。这里f(x)=x2+1
main()
{ printf("The sum=%d\n",SunFun(10)); }
SunFun(int n)
{ int x,s=0;
for(x=0;x<=n;x++) s+=F(【 】);
return s;
}
F(int x)
{ return 【 】);}
有以下程序
void f(int y, int *x)
{ y=y+*x; *X=*X+y; }
main()
{ int x=2,y=4;
f(y,&x);
printf("%d %d\n",x,y);
}
执行后输出结果是______。
有以下程序
include<stdio.h>
main()
{int f,fl,f2,i;
f1=0;{2=1;
prinff(“%d%d”,fl,t2):
for (i=3;i<=5;i++)
{f=f1+f2;prinff(“%d”,f);
fl=f2;12=f:
}
pfinff(“\n”);
}
程序运行后的输出结果是【 】。
以下程序输出的最后一个值是【 】。
int ff(int n)
{ static int f=1;
f=f*n;
retum f;
}
main()
{ int i;
for(i=1;i<=5;i++) printf("%d\n",ff(i))i
}
有以下程序 int f(int n) {if(n==1)return 1; else return f(n-1)+1;} main() { int i,j=0; for(i=1;i<3;i++)j+=f(i); printf("%d\n",j);} 程序运行后的输出结果是
A.4
B.3
C.2
D.1
A.1
B.2
C.4
D.8

















