 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[单选题]
从何处可以改变UG资源条的位置:()
A.可视化显示预设置
B.用户界面预设置
C.建模预设置
D.工作平面预设置
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
A.可视化显示预设置
B.用户界面预设置
C.建模预设置
D.工作平面预设置
如果结果不匹配,请 联系老师 获取答案
 更多“从何处可以改变UG资源条的位置:()”相关的问题
更多“从何处可以改变UG资源条的位置:()”相关的问题
A.可以随意分布多台计算机之间在空间上的位置
B.系统中任意两台计算机都可以通过通信来交换信息
C.系统中的多台计算机之间没有主、从之分
D.每台计算机的用户只能使用本机的资源
从用户角度看,下面列出的条目中()是数据库管理系统应具有的目标。 Ⅰ.用户界面友好 Ⅱ.内部结构清晰、层次分明 Ⅲ.开放性,即符合标准和规范 Ⅳ.负责管理企业组织的数据库资源
A.Ⅰ、Ⅱ
B.Ⅰ、Ⅱ、Ⅲ
C.Ⅲ、Ⅳ
D.都是
从用户角度看,下面列出的条目中()是数据库管理系统应具有的目标。
Ⅰ 用户界面友好
Ⅱ 内部结构清晰、层次分明
Ⅲ 开放性,即符合标准和规范
Ⅳ 负责管理企业组织的数据库资源
A.Ⅰ、Ⅱ
B.Ⅰ、Ⅱ、Ⅲ
C.Ⅲ、Ⅳ
D.都是
在表单设计阶段,下列说法不正确的是()。
A.拖动表单上的对象,可以改变该对象在表单上的位置
B.拖动表单上对象的边框,可以改变该对象的大小
C.通过设置表单上对象的属性,可以改变对象的大小和位置
D.表单上的对象一旦建立,其位置和大小均不能改变
在表单设计阶段,下列说法中不正确的是()。
A.拖动表单上的对象,可以改变该对象在表单上的位置
B.拖动表单上对象的边框,可以改变该对象的大小
C.通过设置表单上对象的属性,可以改变对象的大小和位置
D.表单上的对象一旦建立,其位置和大小均不能改变
A.可以利用鼠标指针拖动的方法,改变窗口的大小形状
B.可以利用鼠标指针拖动的方法,移动窗口的位置
C.利用鼠标指针拖动的方法,既可以改变窗口的大小,又可以移动窗口的位置
D.利用鼠标指针拖动的方法,既不可以改变窗口的大小,也不可以移动窗口位置
试题三(共15分)
阅读下列说明和图,回答问题1至问题3,将解答填入答题纸的对应栏内。
【说明】
某软件公司欲设计实现一个虚拟世界仿真系统。系统中的虚拟世界用于模拟现实世界中的不同环境(由用户设置并创建),用户通过操作仿真系统中的1~2个机器人来探索虚拟世界。机器人维护着两个变量b1和b2,用来保存从虚拟世界中读取的字符。
该系统的主要功能描述如下:
(1)机器人探索虚拟世界(RunRobots)。用户使用编辑器(Editor)编写文件以设置想要模拟的环境,将文件导入系统(LoadFile)从而在仿真系统中建立虚拟世界(SetupWorld)。机器人在虚拟世界中的行为也在文件中进行定义,建立机器人的探索行为程序(SetupProgram)。机器人在虚拟世界中探索时(RunProgram),有2种运行模式:
①自动控制(Run):事先编排好机器人的动作序列(指令(Instruction)),执行指令,使机器人可以连续动作。若干条指令构成机器人的指令集(InstructionSet)。
②单步控制(Step):自动控制方式的一种特殊形式,只执行指定指令中的一个动作。
(2)手动控制机器人(ManipulateRobots)。选定1个机器人后(SelectRobot),可以采用手动方式控制它。手动控制有4种方式:
①Move:机器人朝着正前方移动一个交叉点。
②Left:机器人原地沿逆时针方向旋转90度。
③Read:机器人读取其所在位置的字符,并将这个字符的值赋给b1;如果这个位置上没有字符,则不改变b1的当前值。
④Write:将b1中的字符写入机器人当前所在的位置,如果这个位置上已经有字符,该字符的值将会被b1的值替代。如果这时b1没有值,即在执行Write动作之前没有执行过任何Read动作,那么需要提示用户相应的错误信息(ShowErrors)。
手动控制与单步控制的区别在于,单步控制时执行的是指令中的动作,只有一种控制方式,即执行下个动作;而手动控制时有4种动作。
现采用面向对象方法设计并实现该仿真系统,得到如图3-1所示的用例图和图3-2所示的初始类图。图3-2中的类“Interpreter”和“Parser”用于解析描述虚拟世界的文件以及机器人行为文件中的指令集。
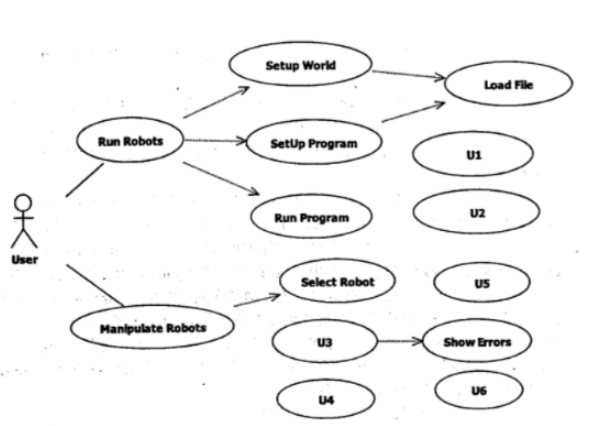
图3-1用例图
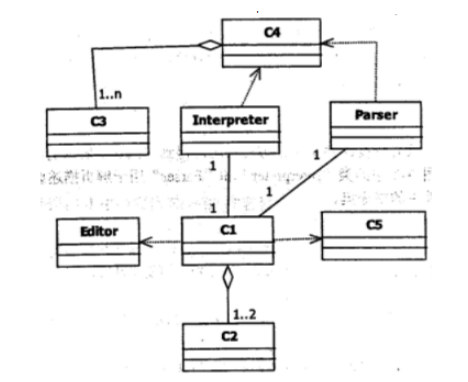
图3-4初始类图
【问题1】(6分)
根据说明中的描述,给出图3-1中U1~U6所对应的用例名。
【问题2】(4分)
图3-1中用例U1~U6分别与哪个(哪些)用例之间有关系,是何种关系?
【问题3】(5分)
根据说明中的描述,给出图3-2中C1~C5所对应的类名。

















