
 ,则JK端的方程为().
,则JK端的方程为().

 如果结果不匹配,请
如果结果不匹配,请 
 更多“若用K触发器来实现特性方程为,则JK端的方程为().”相关的问题
更多“若用K触发器来实现特性方程为,则JK端的方程为().”相关的问题
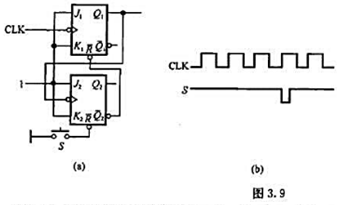
电路如图3.9(a)所示.触发器为JK触发器,设初始状态均为0.试按图3.9(b)给定的输入信号波形画出输出Q1、Q2端的波形.
 其中i、j和k为矩阵下标,矩阵序列中Mi的维度为(Pi-i.)*Pi采用自底向上的方法:实现该算法来确定n个矩阵相乘的顺序,其时间复杂度为(64 )。若四个矩阵M1. M2、M3.,M4相乘的维度序列为2、6、3、10.3,采用上述算法求解,则乘法次数为(65 )。
其中i、j和k为矩阵下标,矩阵序列中Mi的维度为(Pi-i.)*Pi采用自底向上的方法:实现该算法来确定n个矩阵相乘的顺序,其时间复杂度为(64 )。若四个矩阵M1. M2、M3.,M4相乘的维度序列为2、6、3、10.3,采用上述算法求解,则乘法次数为(65 )。A.O(N2)
B.O(N2Lgn)
C.O(N3)
D.O(n3lgn)
设有一个用线性探测法解决冲突得到的散列表:散列函数为H(k)=kmod 11,若查找元素14,则探测的次数(比较的次数)为
A.8
B.9
C.3
D.6
●试题五
阅读以下应用说明及Visual Basic程序代码,将应填入(n)处的字句写在答题纸的对应栏内。
【说明】
本应用程序的运行窗口如图2所示。

窗口中的3个文本框和两个按钮名称分别为Txt_salary、Txt_base、Txt_tax、Cmd_compute和Cmd_quit。运行时,文本框Txt_base中存放的是免税金额基数(应扣除的基本费用)。当用户在文本框Txt_salary中输入月收入(工资或薪金)并单击"计算"按钮Cmd_compute后,Txt_tax框中就显示计算所得的应纳税额。文本框Txt_base和Txt_tax在运行时不接受用户输入,Txt_base的内容以灰色显示。
个人工资(或薪金)所得税是按照超额累进的税率来征收的,方法是:以每月收入总额减去免税金额基数后的余额作为该月的月应纳税所得额,再将应纳税所得额按相应级数采用相应的税率进行累进计算。目前的免税金额基数为800元,税率如表1所示。

设一个人的月应纳税所得额为K(元),用下面的公式计算其应缴纳的个人所得税额S(元);
若0<K≤500,则S=K×5%;
若500<K≤2000,则S=500×5%+(K-500)×10%;
若2000<K≤5000,则S=500×5%+1500×10%+(K-2000)×15%;
若5000<K≤20 000,则S=500×5%+1500×10%+3000×15%+(K-5000)×20%;
…
例如,某人某月工资总额为4100元,减去800元后,应纳税所得额为3300元,其应缴纳的个人所得税额为500*5%+1500*10%+1300*15%=370元。
在开发过程中,需要编写的程序代码如下;
【程序】
Option Base 0
Private Sub Cmd_compute_Click()
Dim paylevel,taxPrate
paylevel=Array(0,500,2000,5000,20000,40000,60000,80000,100000,1000001)
taxPrate=Array(5,10,15,20,25,30,35,40,45)
K= (1)
S=0
If(K>0)Then
For j=1 To 9
If (2) Then
S=S+(paylevel(j)-paylevel(j-1))*taxPrate(j-1)/100
Else
S=S+ (3) *taxPrate(j-1)/100
Exit For
End If
Next j
Ent If
(4) =Str$(S)
End Sub
Private Sub Cmd_quit_Click()
End
End Sub
Private Sub Form_Load()
Txt_tax.Text=″ ″
Txt_salary.Text=″ ″
Txt_base.Text=800
Txt_tax.Locked=True
Txt_base.Enabled= (5)
End Sub
一台PC计算机系统启动时,首先执行的是(42),然后加载(43)。在设备管理中,虚拟设备的引入和实现是为了充分利用设备,提高系统效率,采用(44)来模拟低速设备(输入机或打印机)的工作。
已知A、B的值及表达式A2/(5A+B)的求值过程,且A、B已赋值,则该公式的求值过程可用前驱图(45)来表示,若用P-V操作控制求值过程,需要(46)的信号量。
A.主引导记录
B.分区引导记录
C.BIOS引导程序
D.引导扇区
某被控对象的动态方程

①设计状态反馈向量k ,使得经状态反馈u=kx+r后,闭环系统极点在-1±j处,这里r为参考输入。
②对该被控对象构造一极点为-5、-5的状态观测器。
③若采用控制u=kx+r,其中k为本题①求出的反馈向量、x为本题②所设计的状态观测器,求由被控对象、状态观测器反馈u=kx+r构成的闭环系统的传递函数。
(63)
A.分治
B.动态规划
C.贪心
D.回溯
















