如果结果不匹配,请
如果结果不匹配,请 
 更多“ 加弹机初始卷装动程一般为()mm。”相关的问题
更多“ 加弹机初始卷装动程一般为()mm。”相关的问题
第8题
当33H加弹机出现自动落筒机器人故障时,为确保机台定重定长不受影响,最合适的处理办法是()。
A.调用其他机器人到该机台落筒
B.采用人工模拟机器人落筒,操作速度与机器人落筒基本保持一致
C.根据单个丝饼重量进行手动落筒
D.切断所有锭位后停机,等待机器人修复后再开机生产,落下的丝作非定重处理
第9题
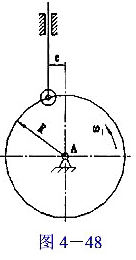
设计一偏置直动滚子从动件盘形凸轮机构,凸轮回转方向及动件初始位置如图4-48所示,已知:偏距e=
设计一偏置直动滚子从动件盘形凸轮机构,凸轮回转方向及动件初始位置如图4-48所示,已知:偏距e=5mm,基圆半径R=20mm,滚子半径rT=5mm,升程h=15mm,从动件运动规律:升程运动角φ=180°从动件以等加速等减速运动上升,远休止角φ8=30°,回程运动角φ´=120°从动件以等速运动至最低点,近休止角φ´s=30°,试:
(1)绘出从动件位移线图;
(2)绘出凸轮实际轮廓曲线.