

 如果结果不匹配,请
如果结果不匹配,请 
 更多“一数字式传感器输出值为99.3゜C,则其分辨率为()゜C。”相关的问题
更多“一数字式传感器输出值为99.3゜C,则其分辨率为()゜C。”相关的问题
A.95kPaABS
B.90kPaABS
C.5kPaABS
D.7kPaABS
若一个栈初始为空,其输入序列是1,2,3…,n-l,n.其输出序列的第一个元素为 k (l≤k≤[n/2]),则输出序列的最后一个元素是(58) 。
A.值为n的元素
B.值为1的元素
C.值为n-k的元素
D.不确定的
A.800℃
B.820℃
C.780℃
【问题1】(9分) 为了测试采集算法,在不考虑测量误差的情况下,设计了表5-1所示的测试用例,请填写该表中的空(1)~(6)。 表5-1 测试用例 序号 输入 输出Out_A1 In_U[0] In_U[1] In_U[2] 预期输出(保留两位小数) 1 0.0V 0.0V 0.0V 0.0V 2 2.0V 2.3V 1.8V (1) 3 1.5V 1.6V 1.3V (2) 4 2.8V 2.6V 2.0V (3) 5 -3.0V -3.1V -2.8V (4) 6 2.0V 1.4V 2.6V (5) 7 3.1V 2.8V 3.2V (6) 【问题2】(9分) 为了测试控制率计算算法,在不考虑测量误差的情况下,设计了表5-2所示的用例,请完善其中的空(1)~(6)。 表5-2 测试用例 序号 前置条件 输入 输出(预期结果) 控制率超差 连续计数 控制率超差 累计计数 计算控制率C1 实际控制率C0 输出控制率 上报故障 1 0 0 1.632 1.638 1.632 无 2 0 0 1.465 1.454 (1) 无 3 (2) 6 2.358 2.369 2.369 三级故障 4 1 (3) 1.569 1.557 1.557 二级故障 5 2 9 2.221 2.234 2.234 (4) 6 0 99 1.835 1.822 (5) 一级故障 7 2 99 2.346 2.357 0 (6) 【问题3】(2分) 测试人员在设计测试用例进行采集算法测试时,发现本项目的三余度采集值的具体处理算法存在l处缺陷,请指出此处缺陷。
若已知一个栈的进栈序列是l,2,3…n,其输出序列是P1,P2,P3,…PN,若P1=3,则P2为()。
A.可能是2
B.一定是2
C.可能是1
D.一定是1
A.被定义为NOT NULL的列不可以被更新为NULL
B.不能在一个子查询中更新一个表,同时从同一个表中选择
C.不能把ORDER BY或LIMIT与多表语法的UPDATE语句同时使用
D.如果把一列设置为其当前含有的值,则该列不会更新
试题一(共 15分)
阅读以下说明和算法,完善算法并回答问题,将解答写在答题纸的对应栏内。
[说明]
假设以二维数组G[1..m,1..n]表示一幅图像各像素的颜色,则G[i,j]表示区域中点(i,j)处的颜色,颜色值为0到k 的整数。下面的算法将指定点(i0,j0)所在的同色邻接区域的颜色置换为给定的颜色值。约定所有与点(i0,j0)同的上、下、左、右可连通的点组成同色邻接区域。
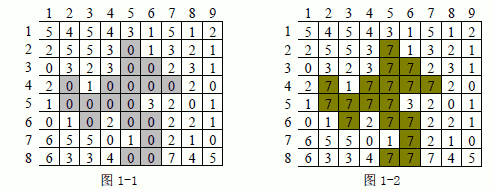
例如,一幅8×9 像素的图像如图1-1 所示。设用户指定点(3,5),其颜色值为0,此时其上方(2,5)、下方 (4,5)、右方(3,6)邻接点的颜色值都为0,因此这些点属于点(3,5)所在的同色邻接区域,再从上、下、左、右四个方向进行扩展,可得出该同色邻接区域的其他点(见图1-1 中的阴影部分)。将上述同色区域的颜色替换为颜色值7所得的新图像如图1-2 所示。
[算法]
输入:矩阵 G,点的坐标(i0,j0),新颜色值newcolor。
输出:点(i0,j0)所在同色邻接区域的颜色置换为newcolor之后的矩阵G。
算法步骤(为规范算法,规定该算法只在第七步后结束):
第一步:若点(i0,j0)的颜色值与新颜色值newcolor相同,则(1) ;
第二步:点(i0,j0)的颜色值→oldcolor;创建栈S,并将点坐标(i0,j0)入栈;
第三步:若 (2) ,则转第七步;
第四步:栈顶元素出栈→(x,y),并(3) ;
第五步:1) 若点(x,y-1)在图像中且G[x,y-1]等于oldcolor,则(x,y-1)入栈S;
2) 若点(x,y+1)在图像中且G[x,y+1]等于oldcolor,则(x,y+1)入栈S;
3) 若点(x-1,y)在图像中且G[x-1,y]等于oldcolor,则(x-1,y)入栈S;
4) 若点(x+1,y)在图像中且G[x+1,y]等于oldcolor,则(x+1,y)入栈S;
第六步:转 (4) ;
第七步:算法结束。
[问题]
是否可以将算法中的栈换成队列?回答: (5) 。
















