题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[单选题]
开环传递函数为G(s)=k(0.5s+1)(0.5s+2)/s(0.5s+3),其根轨迹终点为()。
A.0,-3
B.-2,无穷远
C.0,-6
D.-2,-4
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
A.0,-3
B.-2,无穷远
C.0,-6
D.-2,-4
如果结果不匹配,请 联系老师 获取答案
 更多“开环传递函数为G(s)=k( 0.5s+1)( 0.5s+2…”相关的问题
更多“开环传递函数为G(s)=k( 0.5s+1)( 0.5s+2…”相关的问题
采样系统如图所示,其中T为采样周期。
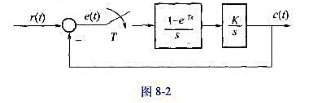
要求:
(1)计算系统开环及闭环脉冲传递函数。
(2)确定闭环系统稳定的K值范围。
(3)讨论采样周期T对系统稳定性的影响。

如果单位负反馈控制系统的开环传递函数为

试用解析法绘出K*从零变到正无穷时闭环根轨迹图,并判断下列点是否在根轨迹上:

已知系统的开环传递函数为

试采用根轨迹法设计微分校正装置Ge(G),使得系统的超调量Mp<20%,过波时间
ts<4秒,井比较校正前后系统的稳态性能。
A.阻尼比增大,超调量增大
B.阻尼比增大,超调量减小
C.阻尼比减小,超调量减小
D.阻尼比减小,超调量增大
单位负反馈系统的开环传递函数为
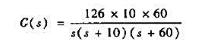
要求设计串联校正装置,使系统满足:
①输入速度为1rad/s时,稳态误差不大于1/126rad;
②相稳定裕度不小于30°,截止频串为20rad/s;
③放大器的增益不变。
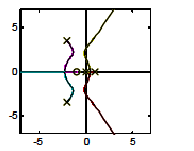
已知负反馈系统的开环传递函数为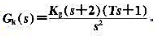
(1)试画出T=0时,θ≤Kg≤∞的根轨迹;
(2)在(1)的根轨迹上,求出满足闭环极点阻尼比 的Kg值;
的Kg值;
(3)在(2)的K值下,画出0≤T≤∞的参量根轨迹;
(4)在(3)的根轨迹上,求出满足闭环极点为临界阻尼的T值。
设一单位负反馈系统的开环传递函数为
(1)由所绘制的根轨迹图,说明对所有的Kg值(0<kg<∞)该系统总是不稳定的。
(2)在s=-α(0<α<2)处加一零点,由所作出的根轨迹,说明加零点后的系统是稳定的。
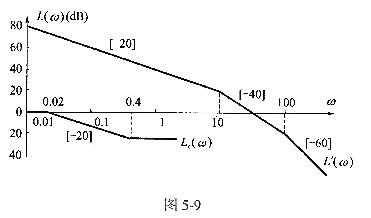
如图所示,最小相位系统开环对数幅频渐近特性为L'(ω),串联校正装置对数幅频特性渐近曲线为Lg(ω)。
(1)求未校正系统开环传递函数G0(s)及中联校正装置Gc(s);
(2)在图中画出校正后系统的开环对数幅频渐近特性L"(w),并求出校正后系统的相位裕度γ";
(3)简要说明这种校正装置的特点。
已知单位反馈系统的开环传递函数
(1)绘制当K0=0→∞变化时系统根轨迹图(求出渐近线,分离点与虚轴交点);
(2)确定开环增益K的取值范围,使系统满足以下条件:

(3)确定在单位斜坡输入下系统稳态误差的最小值。