如果结果不匹配,请
如果结果不匹配,请 
 更多“发电机励磁控制系统的被控对象为()。”相关的问题
更多“发电机励磁控制系统的被控对象为()。”相关的问题
第1题
同步发电机的输入转速、发电频率及发电机本身的磁极对数之间保持严格的恒定关 系,当输入转速为150
0 r/min,发电频率为50 Hz时,则磁极对数为(4)。励磁系统是同步 发电机必不可少的一个组成部分,目前常用的励磁方式分为(5)和(6)。励磁系统的一个 主要作用就是根据发电机负载的变化调节励磁电流从而保证发电机(7)基本不变。
点击查看答案
第3题
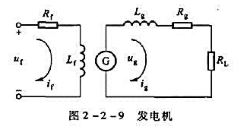
试列写如图2-2-9所示发电机的电枢电压uπ与励磁电压ut之间的动态方程(忽略发电机电感)
试列写如图2-2-9所示发电机的电枢电压uπ与励磁电压ut之间的动态方程(忽略发电机电感)。
第4题
自同期: 将未被励磁的发电机达到额定转速时________电力系统,随即加入励磁,转子被拉入同步。
自同期: 将未被励磁的发电机达到额定转速时________电力系统,随即加入励磁,转子被拉入同步。
点击查看答案
第6题
两台完全相同的并励直流电机,机械上用同一轴联在一起,并联于230V的电网上运行,轴上不带其它负
载。在1000r/min时空载特性如下:
点击查看答案

现在,电机甲的励磁电流为1.4A,电机乙的为1.3A,转速为1200r/min,电枢回路总电阻(包括电刷接触电阻)均为0.1Ω,若忽略电枢反应的影响,试问:
(1)哪一台是发电机?哪一台为电动机?
(2)总的机械损耗和铁耗是多少
(3)只调节励磁电流能否改变两机的运行状态(保持转速不变)?
(4)是否可以在1200r/min时两台电机都从电网吸取功率或向电网送出功率?
第9题
论控制系统的可视化技术 以图形的方式观察和认识事物,是人类最便捷的认知方式之一。控制系统的可
论控制系统的可视化技术
以图形的方式观察和认识事物,是人类最便捷的认知方式之一。控制系统的可视化技术,使得操控人员以更加易于理解的形式掌握被控对象和过程的状态,为操作与决策提供方便。但是,可视化的设计涉及许多相关技术,程序设计复杂,有时甚至比设计控制系统本身的工作量还大。
请围绕“控制系统的可视化”论题,依次对以下三个方面进行论述。
1)概要叙述你参与分析和开发的应用项目以及你所担任的主要工作。
2)论述你在控制系统可视化的设计中所涉及的基本概念和采用的技术、方法,详细叙述实现过程中所遇到的问题以及解决办法。
3)分析与评估可视化技术对改善系统操控性能的效果,并讨论可视化技术的发展趋势与前景。
第10题
某被控对象的动态方程①设计状态反馈向量k ,使得经状态反馈u=kx+r后,闭环系统极点在-1±j处,这
某被控对象的动态方程

①设计状态反馈向量k ,使得经状态反馈u=kx+r后,闭环系统极点在-1±j处,这里r为参考输入。
②对该被控对象构造一极点为-5、-5的状态观测器。
③若采用控制u=kx+r,其中k为本题①求出的反馈向量、x为本题②所设计的状态观测器,求由被控对象、状态观测器反馈u=kx+r构成的闭环系统的传递函数。