题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
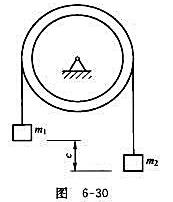
如图6-30所示,两物体的质量分别为m1和m2,用长为l的绳连接,此绳跨过一半径为r的滑轮,如
在开始时两物体间的高差为c,且m1>m2,试求将重物由静止释放后,两物体达到相同高度时所需的时间。假设绳和滑轮的质量不计。
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
 更多“如图6-30所示,两物体的质量分别为m1和m2,用长为l的绳…”相关的问题
更多“如图6-30所示,两物体的质量分别为m1和m2,用长为l的绳…”相关的问题
注意:下面出现的“考生文件夹”均为c:\wexam\25160001。
(1) 在名称为Form1的窗体上画一个名称为H1的水平滚动条,请在“属性”窗口中设置它的属性值,使之满足以下要求:它的最大刻度值为100,最小刻度值为1,在运行时鼠标单击滚动条上滚动框以外的区域(不包括两边按钮),滚动框移动10个刻度。再在滚动条下面画两个名称分别为L1和L2的标签,并分别显示1和100,运行时的窗体如图19-1所示。
注意:存盘时必须存放在考生文件夹下,工程文件名为sjt1.vbp,窗体文件名为sjt1.frm
(2) 在名称为Form1的窗体上画两个文本框,名称分别为Text1和Text2,均无初始内容;再建立一个下拉菜单,菜单标题为“操作”,名称为M1,此菜单下含有两个子菜单项,名称分别为Cooy和Clear、标题分别为“复制”和“清除”。请编写适当的事件过程,使得程序运行时,单击“复制”菜单项,则把 Text1中的内容复制到Text2中,单击“清除”菜单项,则清除Text2中的内容(即在Text2中填入空字符串)。程序运行界面如图19-2所示。要求在程序中不得使用任何变量,每个事件过程中只能写一条语句。
注意:存盘时必须存放在考生文件夹下,工程文件名为sjt2.vbp,窗体文件名为sjt2.frm。
.jpg)
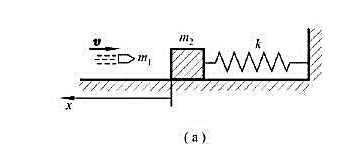
如图(a)所示,质量为1.0x10-2kg的子弹,以500ms-1的速度射入木块,并嵌在木块中,同时使弹簧压缩从而作简谐运动,设木块的质量为4.99kg,弹簧的劲度系数为8.0x103Nm-1,若以弹簧原长时物体所在处为坐标原点,向左为x轴正向,求简谐运动方程。
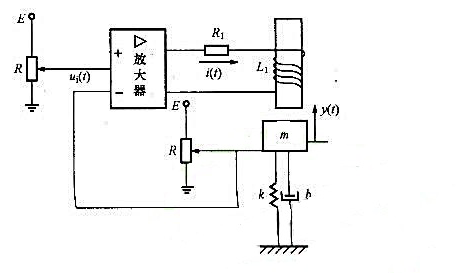
如图1-1所示的机电系统中,路(t)为输入电压: y(t)为输出位置,R1和L1分别为电磁线圈的电阻与电感;m为衔铁的质量;k为弹簧的弹性系数;b为阻尼器的阻尼系数;放大器的增益为A1。假设电磁线圈对衔铁m产生的作用力为f=kti(t);电磁线圈的反电动势为 , 画出系统的原理方框图,并简要说明其工作原理。
, 画出系统的原理方框图,并简要说明其工作原理。
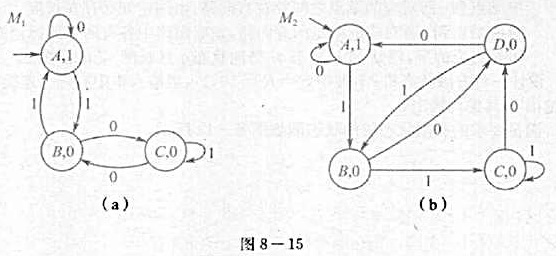
给定有限状态机M1和M2的状态图如图8-15所示。证明:
a)当且仅当输入申是能被3整除的二进制数时,有限状态机M1输出为1,其他为0;
b)当且仅当输入串是能被4整除的二进制数时,有限状态机M2输出为1,其他为0。
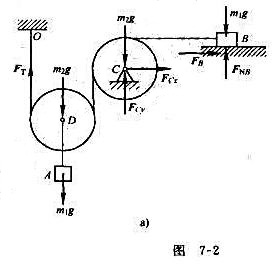
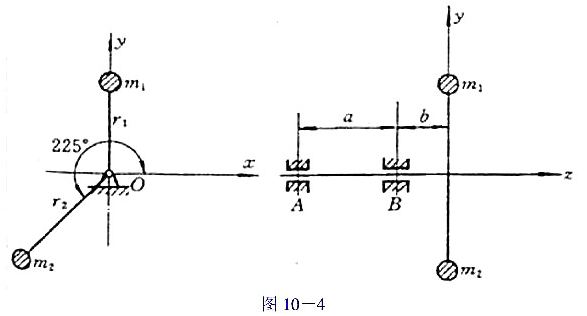
(1)因两集中质量的惯性力而在支承A、B处产生的动压力RA和RB的大小与方向;
(2)为使该回转件达到动平衡,在xOy平面上应加平衡质径积mbrb的大小和方向.
三个可靠度分别为0.7、0.8、0.9的部件R1、R2、R3并联构成一个系统,如图8-1所示。
.jpg)
图8-1 该系统的可靠度为(6)。
A.0.9
B.0.92
C.0.991
D.0.994
仔细阅读远程网络监视(RMON)的监视器配置图(如图5-2所示)。在RMON主机组中,子网2对应的hostControlIndex、hostControlTableSize的值分别为(43)。
.jpg)
A.2,3
B.1,2
C.2,5
D.3,5
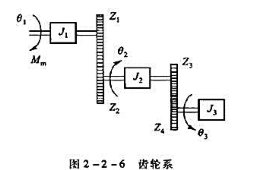
一齿轮系如图2-2-6所示,其中Z1、Z2、Z3和Z4分别为齿轮的齿数,J1、J2、J3表示各传动轴上的转动惯量,θ1、θ2和θ3为各轴的转角,Mm是电动机输出的转矩。试列写折算到电动机轴上的齿轮系运动方程。
【问题3】(11分)
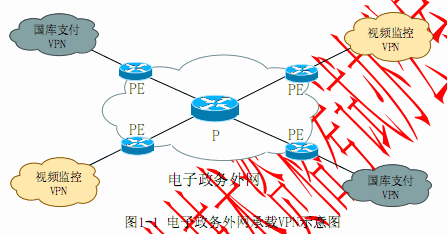
如图1-1所示,采用MPLS VPN技术,省级电子政务外网平台承载了两个VPN,分别为国库支付VPN和视频监控VPN。请从以下方面描述电子政务外网PE路由器上的MPLS VPN配置内容:
(1)VPN 接口配置
(2)PE-CE配置
(3)OSPF配置
(4)MPLS配置