题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
某系统的频率响应,求当输入f(t)为下列函数时的零状态响应yzs(t)。(1)f(t)=ε(t);(2)f(t)=sin
某系统的频率响应,求当输入f(t)为下列函数时的零状态响应yzs(t)。(1)f(t)=ε(t);(2)f(t)=sin
某系统的频率响应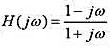 ,求当输入f(t)为下列函数时的零状态响应yzs(t)。(1)f(t)=ε(t);(2)f(t)=sintε(t)。
,求当输入f(t)为下列函数时的零状态响应yzs(t)。(1)f(t)=ε(t);(2)f(t)=sintε(t)。
查看答案

 如果结果不匹配,请 联系老师 获取答案
如果结果不匹配,请 联系老师 获取答案

 更多“某系统的频率响应,求当输入f(t)为下列函数时的零状态响应y…”相关的问题
更多“某系统的频率响应,求当输入f(t)为下列函数时的零状态响应y…”相关的问题


 时,其全响应y2(k)=(k-1)ε(k)。求输入
时,其全响应y2(k)=(k-1)ε(k)。求输入 时的零状态响应。
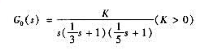
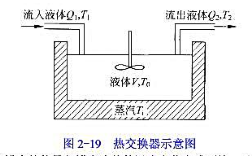
时的零状态响应。 其中Ω(s)为角速度,U(s)为输入电压。假设电动机在控制电压Uo作用下以ωo恒定速度转动,试求电压Uo突然降到零时,电动机的输出响应ω(t)。
其中Ω(s)为角速度,U(s)为输入电压。假设电动机在控制电压Uo作用下以ωo恒定速度转动,试求电压Uo突然降到零时,电动机的输出响应ω(t)。 (Nat)。
(Nat)。