题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
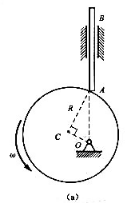
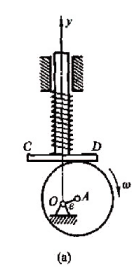
题6-13图(a)所示偏心轮挺杆机构,偏心轮C以匀角速度w绕O轴作定轴转动,已知偏心距为OC=e,偏心轮
题6-13图(a)所示偏心轮挺杆机构,偏心轮C以匀角速度w绕O轴作定轴转动,已知偏心距为OC=e,偏心轮
半径为R=3e,图示瞬时,OC⊥CA,且O,A,B三点共线。求从动杆AB的速度和加速度。
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
半径为R=3e,图示瞬时,OC⊥CA,且O,A,B三点共线。求从动杆AB的速度和加速度。
如果结果不匹配,请 联系老师 获取答案
 更多“题6-13图(a)所示偏心轮挺杆机构,偏心轮C以匀角速度w绕…”相关的问题
更多“题6-13图(a)所示偏心轮挺杆机构,偏心轮C以匀角速度w绕…”相关的问题

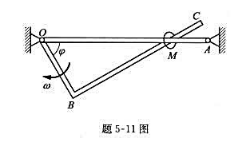
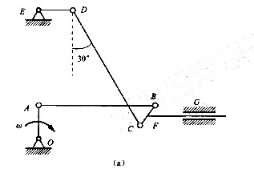
题7-17图(a)所示平面机构,杆OA以角速度w绕O轴转动,尺寸如图所示。试求杆CDE和板ABC的角速度及D点的速度。
题7-18图(a)所示平面机构,杆OA以角速度w绕O轴转动,已知CD=6r,OA=DE=r,试求滑杆FG的速度和杆DE的角速度。
题7-25图(a)所示平面机构中,轮A作纯滚动,A点的速度为vA速度为aA, AB杆长为l.试求:
(1)AB杆的角速度和角加速度。
(2)B点的速度和加速度。

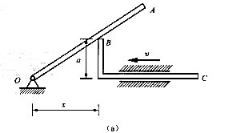
度为小其弯头高为a。求杆端A的速度的大小(表示为x的函数)。
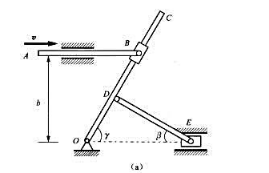
题7-37图(a)所示平面机构中,杆AB以匀速v沿水平方向运动,套筒B与杆AB的端点铰接,并套在绕轴O转动的杆OC上,可沿杆滑动。已知AB和OE两平行线间的垂直距离为b,试求图示位置γ=60°,β=30°。OD=BD时,杆OC的角速度和角加速度,以及滑块E的速度和加速度。
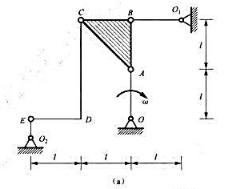
0N,已知AB BC,AB= BC=CD=60mm, E=100mm,M=2kN·m。;不计杆重,求电机对杆OE的力偶矩的大小M。
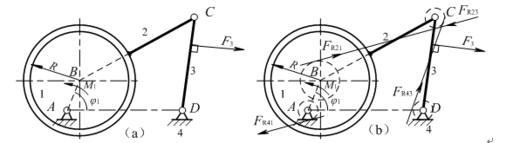
A.偏心轮接触的摩擦圆(虚线圆)中心在B处,如图b所示,其摩擦圆半径为ρ = Rk1f;其他各转动副处的摩擦圆半径为ρ = rkf
B.构件1所受的力FR41方向如图b所示
C.构件2所受力FR12和FR32的作用线与FR21和 FR23方向线共线,且FR12 =? FR32,如图b所示
D.构件3所受的力FR43的作用线如图b所示
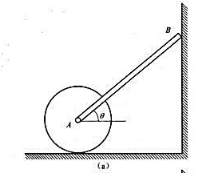
题11-29图(a)所示平面机构,均质细杆AB长为l,质量为m,上端B靠在光滑的墙上,下端A用铰与质量为M,半径为R且放在粗糙地面上的圆柱中心相连。在图示瞬时系统静止且杆与水平线的夹角为θ=45°,试求该瞬时杆AB的角加速度。