 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
设某伺服电动机的传递函数为其中Ω(s)为角速度,U(s)为输入电压。假设电动机在控制电压Uo作用
设某伺服电动机的传递函数为 其中Ω(s)为角速度,U(s)为输入电压。假设电动机在控制电压Uo作用下以ωo恒定速度转动,试求电压Uo突然降到零时,电动机的输出响应ω(t)。
其中Ω(s)为角速度,U(s)为输入电压。假设电动机在控制电压Uo作用下以ωo恒定速度转动,试求电压Uo突然降到零时,电动机的输出响应ω(t)。
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
设某伺服电动机的传递函数为其中Ω(s)为角速度,U(s)为输入电压。假设电动机在控制电压Uo作用下以ωo恒定速度转动,试求电压Uo突然降到零时,电动机的输出响应ω(t)。
如果结果不匹配,请 联系老师 获取答案
 更多“设某伺服电动机的传递函数为其中Ω(s)为角速度,U(s)为输…”相关的问题
更多“设某伺服电动机的传递函数为其中Ω(s)为角速度,U(s)为输…”相关的问题
设一单位负反馈系统的开环传递函数为
(1)由所绘制的根轨迹图,说明对所有的Kg值(0<kg<∞)该系统总是不稳定的。
(2)在s=-α(0<α<2)处加一零点,由所作出的根轨迹,说明加零点后的系统是稳定的。
当存储器采用段页式管理时,主存被划分为定长的(81),程序按逻辑模块分成(82)。在某机器的多道程序环境下,每道程序还需要一个(83)作为用户标识号,每道程序都有对应的(84)。一个逻辑地址包括(83)x、段号s、页号p和页内地址d四个部分。设逻辑地址长度分配如下,其中x,s,p,d均以二进制数表示。
.jpg)
其转换后的物理地址为(86)。
A.段
B.页
C.区域
D.块
A.5+4+3+2+1
B.5+4+3+2
C.4+3+2+l
D.4+3+2
设向量组α1,α2,...,αs的秩为r,在其中任取m个向量 ,证明:此向量组的秩≥r+m-s。
,证明:此向量组的秩≥r+m-s。
设f(x1,...,xn)是一秩为n的二次型,证明:存在R+的一个 维子空间V1(其中s为符号差数),使对任一(x1,...,xn)∈V1有(x1,...,xn)=0。
维子空间V1(其中s为符号差数),使对任一(x1,...,xn)∈V1有(x1,...,xn)=0。
(41)
A.5+4+3+2+1
B.5+4+3+2
C.4+3+2+1
D.4+3+2
设语言L={w|w∈{a,b}+且w中a和b的个数相等},产生语言L的上下文无关文法是(28)。
A.Ga=(VT={a,b},VN={S,A,B},S,P),其中P为, S→a|aA|bSS A→aB|bS B→b|bA|aBB
B.Gb=(VT={a,b},VN={S,A,B},S,P),其中P为, S→b|bB|aSS B→aS|bA A→a|aB|bAA
C.Gc=(VT={a,b},VN{S,A,B},S,P),其中P为, S→aB|bA A→a|aS|bAA B→b|bS|aBB
D.Gd=(VT={a,b},VN={S,A,B},S,P),其中P为, S→aB|bA|s A→aS|bAA B→bS|aBB
设关系R和S的属性个数分别为r个和s个,其中两个关系只有一个相同的属性,那么R
.jpg)
S操作结果的属性个数为【 】。
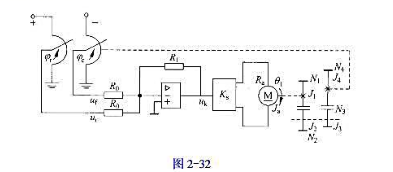
某被控对象的动态方程

①设计状态反馈向量k ,使得经状态反馈u=kx+r后,闭环系统极点在-1±j处,这里r为参考输入。
②对该被控对象构造一极点为-5、-5的状态观测器。
③若采用控制u=kx+r,其中k为本题①求出的反馈向量、x为本题②所设计的状态观测器,求由被控对象、状态观测器反馈u=kx+r构成的闭环系统的传递函数。


















