题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
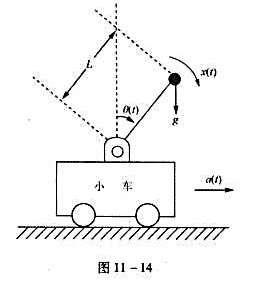
在教材11.1节曾介绍的倒立摆系统重绘于图11-14.图中,摆长为L,不计长杆质量t,末端小球质量为m,
θ(1)是偏离垂线之角度,重力加速度为g,a(t)是小车加速度,x(t)表示扰动(如风吹)引起的角加速度.质沿垂直于杆方向的加速度 应等于沿此方向施加之各种加速度之和,包括重力加速度、小草加速度和扰动加速度,按此要求建立的系统动态方程如下
应等于沿此方向施加之各种加速度之和,包括重力加速度、小草加速度和扰动加速度,按此要求建立的系统动态方程如下
应等于沿此方向施加之各种加速度之和,包括重力加速度、小草加速度和扰动加速度,按此要求建立的系统动态方程如下
此模型为非线性微分方程,在摆处于垂直位置附近,即θ(t)很小的情况下,取如下近似: ,得到如下简化的线性方程
,得到如下简化的线性方程

(1)设x(t)为激励信号,θ(t)是响应信号,若小车不动,即a(t)=0,写出系统函数 表达式,并讨论系统的稳定性.
表达式,并讨论系统的稳定性.
(2)研究适当移动小车对稳定性的影响.假定随θ(t)之变化按比例反馈作用使小车产生加速度,即a(t)=Kθ(t),K为比例系数.画出引入反馈后的系统方框图,并求反馈系统的系统函数.讨论系统的稳定性(分为Kg三种情况).
(3)改用比例-微分(PD)反馈控制,即

其中K1和K2都为正实系数.写出此反馈系统的系统函数,讨论为使系统稳定,K1,K2应满足何种约束条件?
查看答案

 如果结果不匹配,请 联系老师 获取答案
如果结果不匹配,请 联系老师 获取答案

 更多“在教材11.1节曾介绍的倒立摆系统重绘于图11-14.图中,…”相关的问题
更多“在教材11.1节曾介绍的倒立摆系统重绘于图11-14.图中,…”相关的问题