

 如果结果不匹配,请
如果结果不匹配,请 
 更多“顺序动作回路的功用在于使几个执行元件严格按预定顺序动作,按控…”相关的问题
更多“顺序动作回路的功用在于使几个执行元件严格按预定顺序动作,按控…”相关的问题
A.培育政府执行主体的执行力素质
B.重塑政府的行政组织架构
C.建立健全协调高效的政府运行机制
D.构建规范有效的政府执行流程设计及运作
E.制定科学严格的执行监控手段
A.取指令、取操作数、指令译码、执行运算、回送结果
B.取指令、指令译码、取操作数、执行运算、回送结果
C.取指令、指令译码、执行运算、取操作数、回送结果
D.取指令、执行运算、取操作数、指令译码、回送结果
A.组织单位>域>站点
B.域站>点>组织单位
C.组织单位>站点>域
D.站点>域>组织单位
伪码作为详细设计的工具,缺点在于______。
A.每个符号对应于源程序的一行代码,对于提高系统的可理解性作用很小
B.不如其他图形工具直观,描述复杂的条件组合与动作间的对应关系不够明了
C.容易使程序员不受任何约束,随意转移控制
D.不支持逐步求精,使程序员不去考虑系统的全局结构
试题三(共15分)
阅读下列说明和图,回答问题1至问题3,将解答填入答题纸的对应栏内。
【说明】
某软件公司欲设计实现一个虚拟世界仿真系统。系统中的虚拟世界用于模拟现实世界中的不同环境(由用户设置并创建),用户通过操作仿真系统中的1~2个机器人来探索虚拟世界。机器人维护着两个变量b1和b2,用来保存从虚拟世界中读取的字符。
该系统的主要功能描述如下:
(1)机器人探索虚拟世界(RunRobots)。用户使用编辑器(Editor)编写文件以设置想要模拟的环境,将文件导入系统(LoadFile)从而在仿真系统中建立虚拟世界(SetupWorld)。机器人在虚拟世界中的行为也在文件中进行定义,建立机器人的探索行为程序(SetupProgram)。机器人在虚拟世界中探索时(RunProgram),有2种运行模式:
①自动控制(Run):事先编排好机器人的动作序列(指令(Instruction)),执行指令,使机器人可以连续动作。若干条指令构成机器人的指令集(InstructionSet)。
②单步控制(Step):自动控制方式的一种特殊形式,只执行指定指令中的一个动作。
(2)手动控制机器人(ManipulateRobots)。选定1个机器人后(SelectRobot),可以采用手动方式控制它。手动控制有4种方式:
①Move:机器人朝着正前方移动一个交叉点。
②Left:机器人原地沿逆时针方向旋转90度。
③Read:机器人读取其所在位置的字符,并将这个字符的值赋给b1;如果这个位置上没有字符,则不改变b1的当前值。
④Write:将b1中的字符写入机器人当前所在的位置,如果这个位置上已经有字符,该字符的值将会被b1的值替代。如果这时b1没有值,即在执行Write动作之前没有执行过任何Read动作,那么需要提示用户相应的错误信息(ShowErrors)。
手动控制与单步控制的区别在于,单步控制时执行的是指令中的动作,只有一种控制方式,即执行下个动作;而手动控制时有4种动作。
现采用面向对象方法设计并实现该仿真系统,得到如图3-1所示的用例图和图3-2所示的初始类图。图3-2中的类“Interpreter”和“Parser”用于解析描述虚拟世界的文件以及机器人行为文件中的指令集。
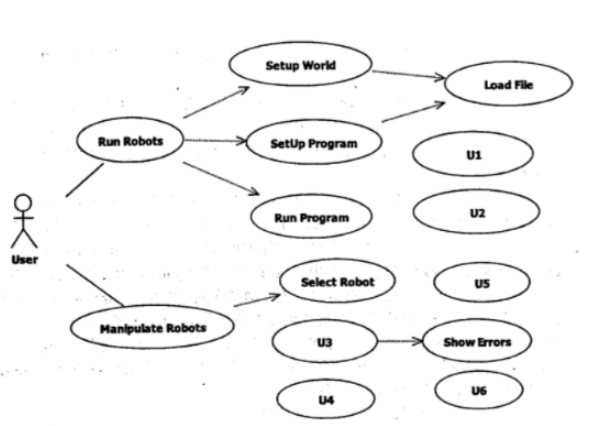
图3-1用例图
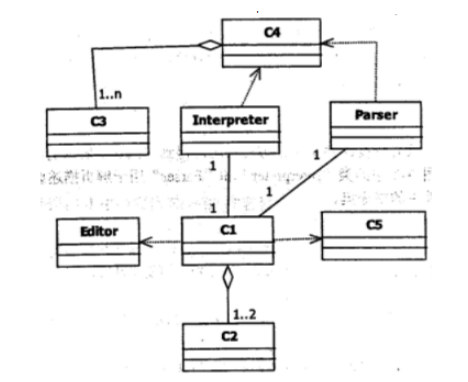
图3-4初始类图
【问题1】(6分)
根据说明中的描述,给出图3-1中U1~U6所对应的用例名。
【问题2】(4分)
图3-1中用例U1~U6分别与哪个(哪些)用例之间有关系,是何种关系?
【问题3】(5分)
根据说明中的描述,给出图3-2中C1~C5所对应的类名。
A.决策者必须全面掌握有关决策环境的信息情报
B.决策者要充分了解有关备选方案的情况
C.决策者应建立一个合理的层级结构,以确保命令的有效执行
D.决策者进行决策的目的始终在于使本组织获取最大的经济利益
A.用例图
B.类图
C.包图
D.组件图@@@SXB@@@A.它是一个UML对象图,反映了系统的静态结构
B.它是一个UML顺序图,反映了系统的动态行为
C.它是一个UML用例图,反映了系统的功能需求
D.它是一个UML状态图,反映了系统的状态变化
A.访问控制包括个重要的过程鉴别和授权
B.访问控制机制分为种强制访问控制(MAC)和自主访问控制(DAC)
C.RBAC基于角色的访问控制对比DAC的先进之处在于用户可以自主的将访问的权限授给其它用户
D.RBAC不是基于多级安全需求的因为基于RBAC的系统中主要关心的是保护信息的完整性即谁可以对什么信息执行何种动作
















