

 如果结果不匹配,请
如果结果不匹配,请 
 更多“工业机器人仿真软件不用创建系统也能打开虚拟示教器。()”相关的问题
更多“工业机器人仿真软件不用创建系统也能打开虚拟示教器。()”相关的问题
A.示教器的系统备份及恢复备份
B.共享-打包&解包
C.仿真软件中的系统备份及恢复备份
D.保存的工作站源文件
试题三(共15分)
阅读下列说明和图,回答问题1至问题3,将解答填入答题纸的对应栏内。
【说明】
某软件公司欲设计实现一个虚拟世界仿真系统。系统中的虚拟世界用于模拟现实世界中的不同环境(由用户设置并创建),用户通过操作仿真系统中的1~2个机器人来探索虚拟世界。机器人维护着两个变量b1和b2,用来保存从虚拟世界中读取的字符。
该系统的主要功能描述如下:
(1)机器人探索虚拟世界(RunRobots)。用户使用编辑器(Editor)编写文件以设置想要模拟的环境,将文件导入系统(LoadFile)从而在仿真系统中建立虚拟世界(SetupWorld)。机器人在虚拟世界中的行为也在文件中进行定义,建立机器人的探索行为程序(SetupProgram)。机器人在虚拟世界中探索时(RunProgram),有2种运行模式:
①自动控制(Run):事先编排好机器人的动作序列(指令(Instruction)),执行指令,使机器人可以连续动作。若干条指令构成机器人的指令集(InstructionSet)。
②单步控制(Step):自动控制方式的一种特殊形式,只执行指定指令中的一个动作。
(2)手动控制机器人(ManipulateRobots)。选定1个机器人后(SelectRobot),可以采用手动方式控制它。手动控制有4种方式:
①Move:机器人朝着正前方移动一个交叉点。
②Left:机器人原地沿逆时针方向旋转90度。
③Read:机器人读取其所在位置的字符,并将这个字符的值赋给b1;如果这个位置上没有字符,则不改变b1的当前值。
④Write:将b1中的字符写入机器人当前所在的位置,如果这个位置上已经有字符,该字符的值将会被b1的值替代。如果这时b1没有值,即在执行Write动作之前没有执行过任何Read动作,那么需要提示用户相应的错误信息(ShowErrors)。
手动控制与单步控制的区别在于,单步控制时执行的是指令中的动作,只有一种控制方式,即执行下个动作;而手动控制时有4种动作。
现采用面向对象方法设计并实现该仿真系统,得到如图3-1所示的用例图和图3-2所示的初始类图。图3-2中的类“Interpreter”和“Parser”用于解析描述虚拟世界的文件以及机器人行为文件中的指令集。
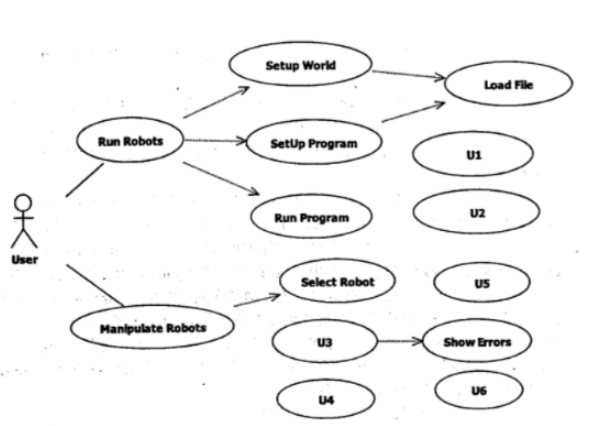
图3-1用例图
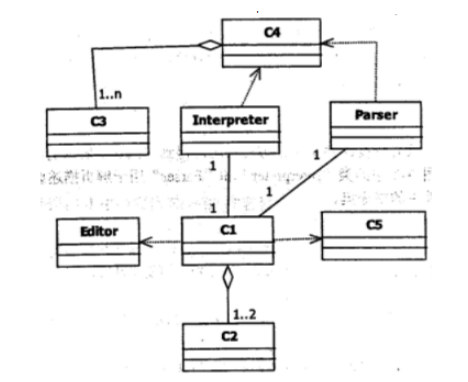
图3-4初始类图
【问题1】(6分)
根据说明中的描述,给出图3-1中U1~U6所对应的用例名。
【问题2】(4分)
图3-1中用例U1~U6分别与哪个(哪些)用例之间有关系,是何种关系?
【问题3】(5分)
根据说明中的描述,给出图3-2中C1~C5所对应的类名。
A.MMC集成了用来管理网络、计算机、服务及其它系统组件的管理工具
B.MMC创建、保存并打开管理工具单元
C.MMC可以运行在Windows XP和Windows 2000操作系统上
D.MMC是用来管理硬件、软件和Windows系统的网络组件
A.应该采用闭环控制架构,因为闭环结构给出了将软件分解成几个协作构件的方法,这对于复杂任务特别适合
B.应该采用闭环控制结构,因为闭环控制架构中机器人的主要构件(监控器、传感器、发动机等)是彼此分开的,并能够独立替换
C.应该采用分层结构,因为分层结构很好地组织了用来协调机器人操作的构件,系统结构更加清晰
D.应该采用分层结构,因为抽象层的存在,满足了处理不确定性的需要:在较低层次不确定的实现细节在较高层次会变得确定
A.应该采用闭环控制架构,因为闭环结构给出了将软件分解成几个协作构件的方法,这对于复杂任务特别适合
B. 应该采用闭环控制结构,因为闭环控制架构中机器人的主要构件(监控器、传感器、发动机等)是彼此分开的,并能够独立替换
C. 应该采用分层结构,因为分层结构很好地组织了用来协调机器人操作的构件,系统结构更加清晰
D. 应该采用分层结构,因为抽象层的存在,满足了处理不确定性的需要:在较低层次不确定的实现细节在较高层次会变得确定
假设在LAC路由器上运行show vpdn命令,路由器软件系统输出的配置信息如图5-17所示。结合图 5-15所示的网络拓扑结构,请将(5)~(9)空缺处填写完整,完成在LAC上对L2TPv2协议的相关配置。
2.jpg)
Router_LAC(config)vpdn enable
Router_LAC(config) (5) (创建相应vpdn组,并进入该组的配置模式)
(6) (接受对端发起L2TP通道连接请求,并根据virtual—template 1创建virtual-access接口)
Router_LAC(config-vpdnl) (7) (启用L2TP通道验证功能)
Router_LAC(config-vpdnl)12tp tunnel password! abcd1234!
(8)
Router_LAC(config) (9) (创建并进入相应的L2TP虚接口模板)
(其他配置略)
















