 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[单选题]
桁架拱片是主要承重构件,包括()等。 ①上弦杆 ②下弦杆 ③腹杆 ④实腹段 ⑤立柱
A.①②③
B.①②④
C.①②③④
D.①②③④⑤
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
A.①②③
B.①②④
C.①②③④
D.①②③④⑤
如果结果不匹配,请 联系老师 获取答案
 更多“桁架拱片是主要承重构件,包括()等。 ①上弦杆 ②下弦杆 ③…”相关的问题
更多“桁架拱片是主要承重构件,包括()等。 ①上弦杆 ②下弦杆 ③…”相关的问题
简述你参加过软件应用开发项目的概要和你所担任的工作。
IP核是实现片上系统(SOC)的基本构件,完成结构描述的IP核模块是(25)。
A.Soft IP Core
B.Hard IP Core
C.Firm IP Core
D.DSP Core
A.在建立软件架构的初期,一般需要选择一个合适的架构风格
B. 将架构分析阶段已标识的构件映射到架构中,并分析这些构件之间的关系
C. 软件架构设计活动将已标识构件集成到软件架构中,设计并实现这些构件
D. 一旦得到了详细的软件架构设计,需要邀请独立于系统开发的外部人员对系统进行评审
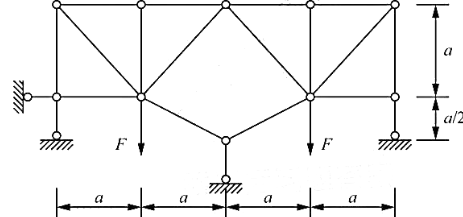
图2-3-3所示桁架结构的零杆(包括支座链杆)数目为().
A.5根
B.6根
C.7根
D.8根
A.在建立软件架构的初期,一般需要选择一个合适的架构风格
B.将架构分析阶段已标识的构件映射到架构中,并分析这些构件之间的关系
C.软件架构设计活动将己标识构件集成到软件架构中,设计并实现这些构件
D.一旦得到了详细的软件架构设计,需要邀请独立于系统开发的外部人员对系统进行评审
A.应该采用闭环控制架构,因为闭环结构给出了将软件分解成几个协作构件的方法,这对于复杂任务特别适合
B.应该采用闭环控制结构,因为闭环控制架构中机器人的主要构件(监控器、传感器、发动机等)是彼此分开的,并能够独立替换
C.应该采用分层结构,因为分层结构很好地组织了用来协调机器人操作的构件,系统结构更加清晰
D.应该采用分层结构,因为抽象层的存在,满足了处理不确定性的需要:在较低层次不确定的实现细节在较高层次会变得确定
A.应该采用闭环控制架构,因为闭环结构给出了将软件分解成几个协作构件的方法,这对于复杂任务特别适合
B. 应该采用闭环控制结构,因为闭环控制架构中机器人的主要构件(监控器、传感器、发动机等)是彼此分开的,并能够独立替换
C. 应该采用分层结构,因为分层结构很好地组织了用来协调机器人操作的构件,系统结构更加清晰
D. 应该采用分层结构,因为抽象层的存在,满足了处理不确定性的需要:在较低层次不确定的实现细节在较高层次会变得确定
下面关于8259A中断控制器的叙述中,错误的是
A.一片8259A可管理8个中断请求信号
B.采用多片8259A时,每个8259A的INT信号直接相连后作为系统的中断请求信号
C.通过对8259A的初始化编程可以实现对中断请求信号进行屏蔽
D.8259A包括中断请求寄存器、优先级分析器、中断服务寄存器和中断屏蔽寄存器等

















