

 如果结果不匹配,请
如果结果不匹配,请 
 更多“ 旋转阻尼系统中,阻尼管内油柱的离心力越大,阻尼管内腔的排油…”相关的问题
更多“ 旋转阻尼系统中,阻尼管内油柱的离心力越大,阻尼管内腔的排油…”相关的问题
第3题
在重物一 弹簧系统中,已知重物的质量m=2kg,弹簧的刚性系数k=20N/cm。作用在重物上的激振力Fa
=16sin60t ,其中t以s计,Fa以N计;阻力Fd=μv,其中μ=256N·s/cm。求:(1)无阻尼时重物的强迫振动方程和放大因数;(2)有阻尼时重物的强迫振动方程和放大因数。
点击查看答案
第5题
控制系统框图如图所示,试求(1)当K1=25,Kf=0时,系统的阻尼系数ξ无阻尼自然振荡频率ωn
控制系统框图如图所示,试求(1)当K1=25,Kf=0时,系统的阻尼系数ξ无阻尼自然振荡频率ωn
点击查看答案
控制系统框图如图所示,试求
(1)当K1=25,Kf=0时,系统的阻尼系数ξ无阻尼自然振荡频率ωn以及系统对单位斜坡输入的稳态误差ess
(2)当K1=25,Kf=4时重复(1)的要求;
(3)要使系统的阻尼系数ξ=0.7,单位斜坡输入信号作用下系统的稳态误差ess=0.1,试确定K1和Kf的数值,并计算在此参数情况下,系统单位阶跃响应的超调虽、上升时间和调整时间。

第9题
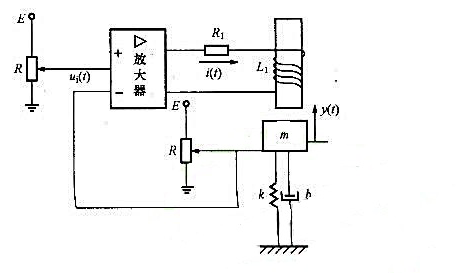
如图1-1所示的机电系统中,路(t)为输入电压: y(t)为输出位置,R1和L1分别为电磁线圈的电
如图1-1所示的机电系统中,路(t)为输入电压: y(t)为输出位置,R1和L1分别为电磁线圈的电阻与电感;m为衔铁的质量;k为弹簧的弹性系数;b为阻尼器的阻尼系数;放大器的增益为A1。假设电磁线圈对衔铁m产生的作用力为f=kti(t);电磁线圈的反电动势为 , 画出系统的原理方框图,并简要说明其工作原理。
, 画出系统的原理方框图,并简要说明其工作原理。
第10题
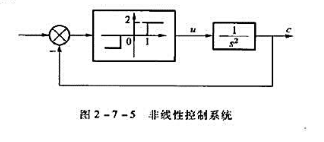
设系统如图2-7-5所示,求出起始点在的相轨迹的方程式。并计算这条封闭相轨迹所对应的周期,将这里
设系统如图2-7-5所示,求出起始点在 的相轨迹的方程式。并计算这条封闭相轨迹所对应的周期,将这里所得的结果与主教材图7-24所示线性无阻尼运动的情况进行比较。
的相轨迹的方程式。并计算这条封闭相轨迹所对应的周期,将这里所得的结果与主教材图7-24所示线性无阻尼运动的情况进行比较。
第11题
对于转杯式火嘴,燃料油由油泵送人进油体,然后进入空心轴,并通过进油管喷人高速旋转的转杯内壁上。转杯固定在空心轴上,转杯上的油随杯与空心轴一起高速转动,()。在强大的离心力作用下,油在转杯中变成一层紧贴杯壁的薄膜,在杯口的油粒以伞形细粒状切向飞离杯口,初步雾化形成环形油膜。
A.普通型转速是1000~1500r/min,高速回转型转速是2000~3000r/min
B.普通型转速是3000~3600r/min,高速回转型转速是5000~6000r/min
C.普通型转速是3000~3600r/min,高速回转型转速是6000~8000r/min
D.普通型转速是5000~6000r/min,高速回转型转速是8000~18000r/min
















