题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
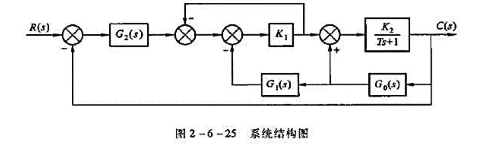
系统结构图如图2-6-25所示。图中K1、K2、T均大于零,G0(s)的特性有一定的变化。若要求
系统结构图如图2-6-25所示。图中K1、K2、T均大于零,G0(s)的特性有一定的变化。若要求
G0(s)的特性变化不影响输出c(t),且系统在r(t)=t作用下无稳态误差。试设计G1(s)、G2(s),并说明G1(s)、G2(s)参数应满足的条件。
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
G0(s)的特性变化不影响输出c(t),且系统在r(t)=t作用下无稳态误差。试设计G1(s)、G2(s),并说明G1(s)、G2(s)参数应满足的条件。
如果结果不匹配,请 联系老师 获取答案
 更多“系统结构图如图2-6-25所示。图中K1、K2、T均大于零,…”相关的问题
更多“系统结构图如图2-6-25所示。图中K1、K2、T均大于零,…”相关的问题
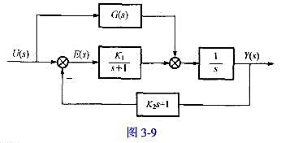
已知系统结构图如图3-9所示:
(1)欲使系统闭环极点配置在-3+j4, -3-j4处,试求K1和K2的值;
(2)设计G(s),使阶跃作用u(t)下稳态误差为零。
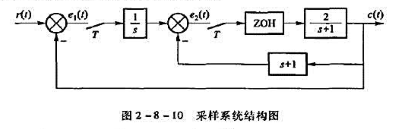
采样系统结构图如图2-8-10所示,图中T为采样周期,T=1s。求出闭环系统脉冲传递函数C(z)/R(z),并判断闭环系统的稳定性。
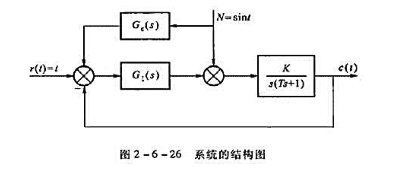
系统的结构图如图2-6-26 所示。图中K>0,T>0,误差的定义为R-C。
①设计G1(s)、Gc(s)使系统在干扰N和控制输入r同时作用下无稳态误差。
②若不采用图中的干扰补偿方案,而改为只用G1(s)来消除干扰N和r同时作用下的稳态误差,问G1(s)应如何设计,说明G1(s)结构和参数应满足的条件。
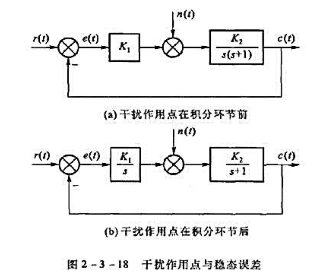
已知r(t)=t·1(t),n(t)=1(t),e=r-c。
①试求如图2-3-18(a)所示系统的稳态误差;
②若把图2-3-18(a)中所示系统改变为图2-3-18(b)中的形式,说明稳态误差有何变化;
③比较①、②结果,说明积分环节和干扰作用点的影响;
④说明图2-3-18(a)、(b)两图中K1、K2对系统稳态误差的影响。
.jpg)
A.模块A条件调用B和C模块
B.模块A循环调用B和C模块
C.模块A循环调用B、C、E和F模块
D.模块C条件调用E和P模块
计算机各功能部件之间的合作关系如图3-2所示。假设图中虚线表示控制流,实线表示数据流,则部件a、b和c分别表示(24)。
.jpg)
图 3-2 计算机各功能部件结构图
A.内存储器、控制器和运算器
B.控制器、内存储器和运算器
C.内存储器、运算器和控制器
D.控制器、运算器和内存储器
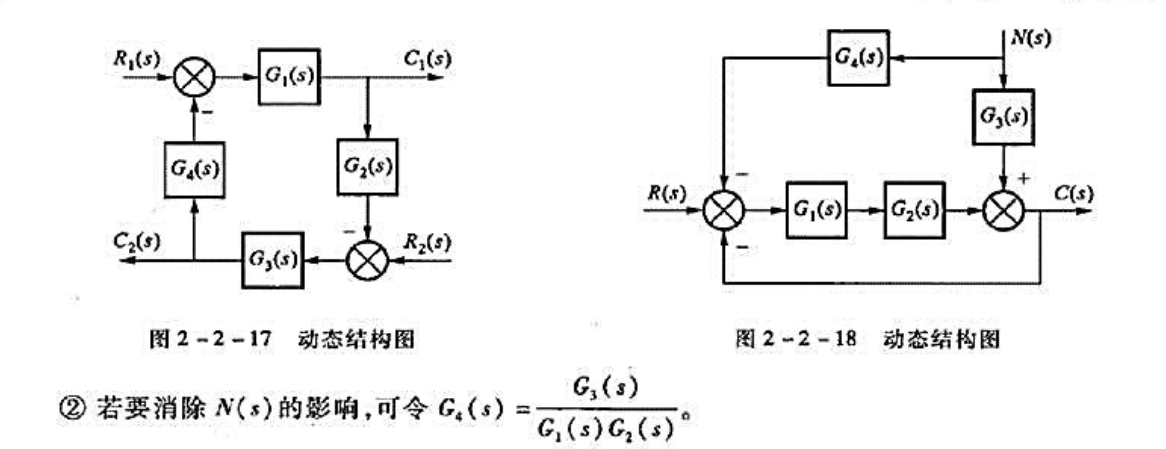
已知系统结构图如图2-2-17所示,求传递函数C1(s)/R1(s)、C2(s)/R2(s)、
C1(s)/R2(s)和C2(s)/R1(s)。
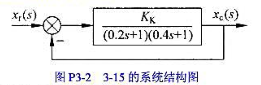
一系统的动态结构图如图P3-2所示,求在不同的Kk值下(例如,KK=1, Kk=3, Kk=7)系统的闭环极点、单位阶跃响应、动态性能指标及稳态误差。
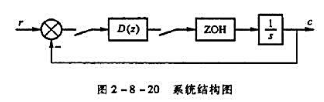
系统的结构图如图2-8-20所示,采样周期T=1s, 试设计控制器的脉冲传递函数D(z),使该系统在输入为单位阶跃信号时,输出满足以下条件:c(0)=0,c(k)=1,k>0,其中k为正整数。