题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
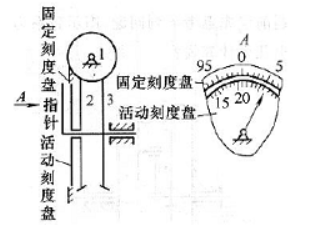
图示为绕线机的计数器。图中1为单头蜗杆,其一端装手把,另一端装绕制线圈。2、3为两个窄蜗轮,z2
=99,Z3=100。 在计数器中有两个刻度盘,在固定刻度盘的一周上有100 个刻度,在与蜗轮2固连的活动刻度盘的一周上有99个刻度,指针与蜗轮3固连。问指针在固定刻度盘上和活动刻度盘上的每一格读数各代表绕制线圈的匝数是多少?又在图示情况下,线圈已绕制了多少匝?
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
 更多“图示为绕线机的计数器。图中1为单头蜗杆,其一端装手把,另一端…”相关的问题
更多“图示为绕线机的计数器。图中1为单头蜗杆,其一端装手把,另一端…”相关的问题
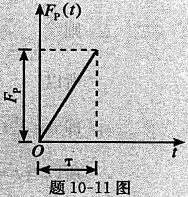
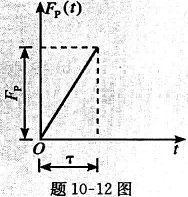
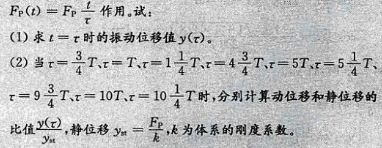
设有一个自振周期为T的单自由度体系,承受图示突加荷载作用。试:
(1)求任意时刻t的位移y(t).
(2)证明:当τ<0.5T时,最大位移发生在时刻t>τ(即卸载后);当t>0.5T时,最大位移发生在t<τ(即卸载前).
(3)当τ=0.1T,τ=0.2T,τ=0.3T,τ=0.5T时,求最大位移ymax与静位移 的比值。
的比值。
(4)证明: 的最大值为2;当τ<0.1T时,可按瞬时冲量计算,误差不大。 分析 t为荷载持续时间,τ为积分变量。
的最大值为2;当τ<0.1T时,可按瞬时冲量计算,误差不大。 分析 t为荷载持续时间,τ为积分变量。
A.若在头结点中存入链表长度值,则求链表长度运算的时间复杂度为O(1)
B.在链表的任何一个元素前后进行插入和删除操作可用一致的方式进行处理
C.加入头结点后,代表链表的头指针不因为链表为空而改变
D.加入头结点后,在链表中进行查找运算的时问复杂度为O(1)
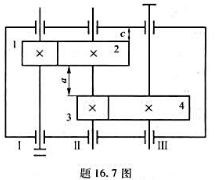
图示为二级圆柱齿轮减速器。已知 高速级齿轮齿宽b12=45mm,低速级齿轮齿宽b34=60mm,轴I传递的功率P=4kW,转速n1=960r/min,不计摩擦损失。图中a、c取为5~20mm.轴承端面到减速器内壁距离取为5-10mm,试按弯扭合成强度校核计算设计中间轴Ⅱ并绘出轴的结构图。
高速级齿轮齿宽b12=45mm,低速级齿轮齿宽b34=60mm,轴I传递的功率P=4kW,转速n1=960r/min,不计摩擦损失。图中a、c取为5~20mm.轴承端面到减速器内壁距离取为5-10mm,试按弯扭合成强度校核计算设计中间轴Ⅱ并绘出轴的结构图。
阅读下列说明,回答问题1至问题3,将解答填入的对应栏内。
[说明]
下图为某项目主要工作的单代号网络图。工期以工作日为单位。
.jpg)
请在图中填写各活动的最早开始时间(ES)、最早结束时间(EF)、最晚开始时间 (LS)、最晚结束时间(LF),从第0天开始计算。
(60)
A. 若在头结点中存入链表长度值,则求链表长度运算的时间复杂度为O(1)
B. 在链表的任何一个元素前后进行插入和删除操作可用一致的方式进行处理
C. 加入头结点后,代表链表的头指针不因为链表为空而改变
D. 加入头结点后,在链表中进行查找运算的时间复杂度为O(1)
A.计数器的当前值不等于0时,计数器位为1
B.计数器的当前值不等于0时,计数器位为0
C.计数器的当前值为0时,计数器位为1
D.计数器的当前值为0时,计数器位为0
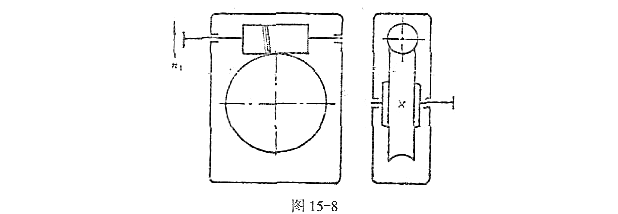
如图15-8所示为蜗轮蜗杆减速器,试求:
(1)蜗轮轴的转向。
(2)蜗轮齿合点所受的圆周力F1、径向力Fr、轴向力Fa的方向。
设有一个自振周期为T的单自由度体系,承受图示直线渐增荷载
(3)从以上的计算结果可以得到怎样的结论?