 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
追线:在xoy平面上,有某物P从原点出发,以常速a>0沿x轴的正方向运动。同时又有某物Q以常速b从点(0,1)出发追赶。设b>a,且Q的运动方向永远指向P。试求Q的运动轨迹,以及追上P的时间。
追线:在xoy平面上,有某物P从原点出发,以常速a>0沿x轴的正方向运动。同时又有某物Q以常速b从点(0,1)出发追赶。设b>a,且Q的运动方向永远指向P。试求Q的运动轨迹,以及追上P的时间。
查看答案

 如果结果不匹配,请 联系老师 获取答案
如果结果不匹配,请 联系老师 获取答案

 更多“追线:在xoy平面上,有某物P从原点出发,以常速a>0沿x轴…”相关的问题
更多“追线:在xoy平面上,有某物P从原点出发,以常速a>0沿x轴…”相关的问题
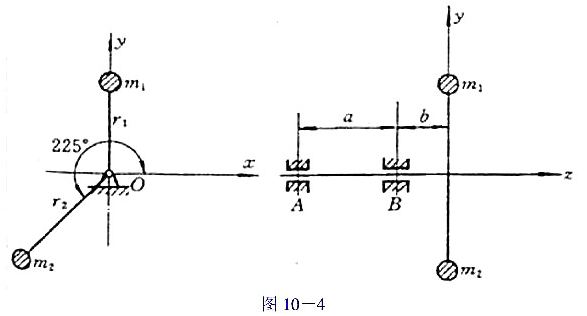
 的作用,力的方向指向原点,大小等于质点到原点的距离。
的作用,力的方向指向原点,大小等于质点到原点的距离。 在第一象限内移动到点B(0,b)时力
在第一象限内移动到点B(0,b)时力
.jpg)
 .
.















