题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
某温度计传递函数为,现用温度计测容器中水温。若温度计和容器中水温均为30℃时,给容器中水加热5m
某温度计传递函数为 ,现用温度计测容器中水温。若温度计和容器中水温均为30℃时,给容器中水加热5min,使水温以每分钟上升12℃均匀上升;试求再经过多长时问温度计的读数温度为86℃(计算取小数点后1位;不考虑水的散热)。
,现用温度计测容器中水温。若温度计和容器中水温均为30℃时,给容器中水加热5min,使水温以每分钟上升12℃均匀上升;试求再经过多长时问温度计的读数温度为86℃(计算取小数点后1位;不考虑水的散热)。
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
某温度计传递函数为,现用温度计测容器中水温。若温度计和容器中水温均为30℃时,给容器中水加热5min,使水温以每分钟上升12℃均匀上升;试求再经过多长时问温度计的读数温度为86℃(计算取小数点后1位;不考虑水的散热)。
如果结果不匹配,请 联系老师 获取答案
 更多“某温度计传递函数为,现用温度计测容器中水温。若温度计和容器中…”相关的问题
更多“某温度计传递函数为,现用温度计测容器中水温。若温度计和容器中…”相关的问题
已知某有源健波电路的传递函数为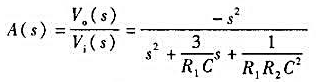 (1)试定性分析该电路的滤波特性(低通,高通,带通或带阻)(提示:可从增益随角频率变化情况判断);(2)求通带增益A0,特征角频率we及等效品质因数Q。
(1)试定性分析该电路的滤波特性(低通,高通,带通或带阻)(提示:可从增益随角频率变化情况判断);(2)求通带增益A0,特征角频率we及等效品质因数Q。
试题七(共15分)
阅读以下应用说明以及用Visual Basic 编写的程序代码,将应填入(n) 处的字句写在答题纸的对应栏内。
[应用说明]
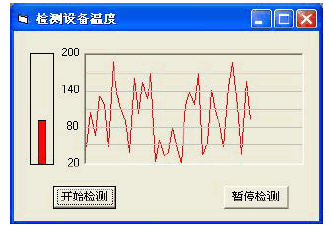
某应用程序用于监测某种设备的工作温度(20~200度),其运行窗口中,包括一个温度计(矩形形状shpMeter)以及其中指示当前设备温度的水银柱(矩形形状shpT),文字标签标记了温度刻度;另有一个图片框picCurve,用于动态描述检测到的温度曲线(用户见到的曲线与水银柱等高变化);命令按钮“开始测”(cmdStart)用于启动温度检测,命令按钮“暂停检测”(cmdStop)用于暂停检测。矩形形状 shpT(水银柱)属性visible 初始设置为不可见,属性Filltype 设置为solid(实心),FillColor设置为红色;图片框picCurve的属性AutoRedraw设置为True;再创建一个定时器TimT,属性Enabled初始设置为False(不起作用),属性Interval(定时间隔)设置为500 毫秒。为模拟设备温度的检测,程序中利用了(0,1)之间均匀分布的伪随机数获得[20,200]之间的随机温度T。为了便于在图片框picCurve 中绘制曲线,程序中对该图片框立了坐标系统,左上角为原点(0,0),水平向右方向为X 轴,垂直向下方向为Y 轴,右下角坐标为(50,180)。为了便于观察记录的温度值,图片框中从上到下创建了5 条水平线Ls(i),i=0,1,…4,并在程序中按等间隔排列进行位置设置。程序中每隔半秒算出曲线点(x,y),其中x=0,1,2,…,再用直线段连接各相邻曲线点形成温度曲线。
[Visual Basic程序代码]
Dim (1) As Integer '声明全局变量
Private Sub CmdStart_Click()
TimT.Enabled = True
ShpT.Visible = True
End Sub
Private Sub CmdStop_Click()
TimT.Enabled = False
End Sub
Private Sub Form_Load()
Dim i, H As Integer
PicCurve.Scale (0, 0)-(50, 180) '设置图片框坐标系:左上角-右下角
H = 30 'H 等于图片框高度的六分之一
For i = 0 To 4 '设置5条水平线Ls(i)的位置
Ls(i).X1 = 0 'Ls(i)起点横坐标
Ls(i).Y1 = H * (2) 'Ls(i)起点纵坐标
Ls(i).X2 = 50 'Ls(i)终点横坐标
Ls(i).Y2 = Ls(i).Y1 'Ls(i)终点纵坐标
Ls(i).BorderColor = &HC0C0C0 '设置水平线颜色
Next i
x = 0 '设置曲线坐标初值
End Sub
Private Sub timT_Timer()
Dim T, H As Integer 'T为即时温度,H 为图片框中温度点显示高度
T = Int(Rnd * 181) + 20 '模拟随机产生设备温度(20~200 度)
'按当前温度显示水银柱
H = ShpMeter.Height * (3) '算出水银柱的高度
ShpT.Top = (4) - H '设置水银柱顶部位置
ShpT.Height = H '设置水银柱的高度
'绘制温度曲线
y = (5) '算出曲线上当前点的纵坐标
If x = 51 Then '当超出图片框时
PicCurve.Cls '清除图片框内以前画的曲线
x = 0 '设置重画曲线的初值
ElseIf x > 0 Then '除左边点外
PicCurve.Line (x-1,Lasty)-(x,y),vbRed '由前1 点到当前点画红色线段
End If
x = x + 1 '准备下一点坐标
Lasty =y '保存当前坐标供下次使用
End Sub
某被控对象的动态方程

①设计状态反馈向量k ,使得经状态反馈u=kx+r后,闭环系统极点在-1±j处,这里r为参考输入。
②对该被控对象构造一极点为-5、-5的状态观测器。
③若采用控制u=kx+r,其中k为本题①求出的反馈向量、x为本题②所设计的状态观测器,求由被控对象、状态观测器反馈u=kx+r构成的闭环系统的传递函数。
(46)A.测试人员素质不高
B.测试用例设计方法不当
C.缺少评审环节
D.缺少质量审计环节
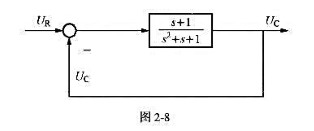
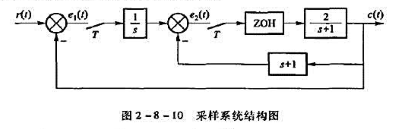
采样系统结构图如图2-8-10所示,图中T为采样周期,T=1s。求出闭环系统脉冲传递函数C(z)/R(z),并判断闭环系统的稳定性。
A.50.45吨
B.50吨
C.44.96吨
D.43.7吨