 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[单选题]
图中t³0时uc(t)为()。
图中t³0时uc(t)为()。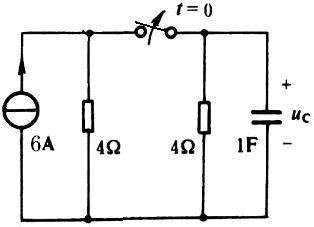
A.u(t)=12e-0.25t
B.u(t)=12-12e-0.25t
C.其它
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
A.u(t)=12e-0.25t
B.u(t)=12-12e-0.25t
C.其它
如果结果不匹配,请 联系老师 获取答案
 更多“图中t³0时uc(t)为()。”相关的问题
更多“图中t³0时uc(t)为()。”相关的问题
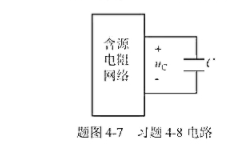
电路如题图4-7所示,电容C=0.2F时零状态响应现若C=0.05F,且uc(0)=5V,其他条件不变,求t≥0时的全响应uc(t)。
电路如题图4-5所示,开关在t<0时一直打开,在t=0时突然闭合。求u(t)的零输入响应和零状态响应。
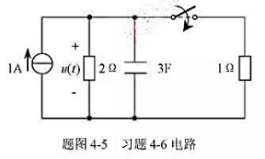
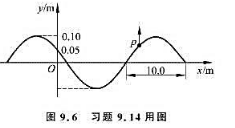
图9.6为一简谐波在t=0时刻的波线曲线,设此简谐波的频率为250Hz,图中质点p正向上运动,求:
(1)此简谐波的波函数;
(2)在距原点O为7.5m处质点振动的表达式和t=0时质点的振动速度。
某被控制对象的动态方程
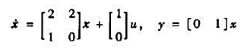
①设计状态反馈向量k,使得经状态反馈u=kx+r后,闭环系统在输入r=1(t)、x(0)=0时,响应的超调量为16.3%、过渡过程为7s(取5%误差带)。
②设x(0)=0,求经上述状态反馈后闭环系统在输入信号r=1(t)作用下的响应y(t)。
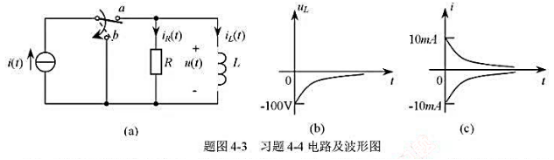
电路如题图4-3所示,i(t)=10mA、R=10kΩ、L=1mH。开关接在a端为时已久,在t=0时开关由a端投向b端,求t≥0时,u(t)、iR(t)和iL(t),并绘出波形图。
无源电网络如图2-7所示。输入电压为ug(t) ,输出电压为uc(1)。

其中:R1=R2=1Ω, L=1H, C=1F。
(1)绘制方框图;
(2)求输出与输入间的传递函数;
(3)求输出与输入间的微分方程。
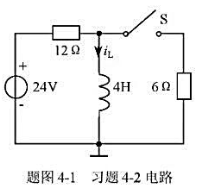
电路如题图4-1所示,电源电压为24V,且电路原已达稳态,t=0时合上开关S,则电感电流iL(t)=()A.
已知负反馈系统的开环传递函数为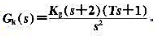
(1)试画出T=0时,θ≤Kg≤∞的根轨迹;
(2)在(1)的根轨迹上,求出满足闭环极点阻尼比 的Kg值;
的Kg值;
(3)在(2)的K值下,画出0≤T≤∞的参量根轨迹;
(4)在(3)的根轨迹上,求出满足闭环极点为临界阻尼的T值。
控制系统的结构如图3-3所示。
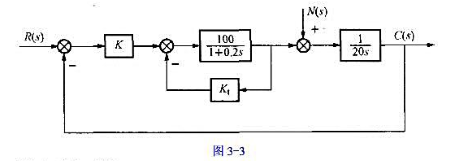
(1)当输入r(t)为单位阶跃函数,n(t)=0时,试选择K和Kt,使得闭环系统的超调虽σ%=40%,调整时间 ;并计算稳态位置,速度和加速度误差系数Kp、Kv、Ka;
;并计算稳态位置,速度和加速度误差系数Kp、Kv、Ka;
(2)设干扰n(t)=0,输入r(t)=t,试问K和Kt之值对稳态误差有何影响?
(3)设输入r(t)=0。当干扰n(t)为单位阶跃函数时,K和Kt之值对稳态误差有何影响?
已知质点的质量为m,轨迹方程为 ,加速度恒与y轴平行。当t=0时的初始坐标(0,b),初速度为v0,求质点在轨迹上任何位置时所受的力。
,加速度恒与y轴平行。当t=0时的初始坐标(0,b),初速度为v0,求质点在轨迹上任何位置时所受的力。

















